| Orin Nano 4GB | Orin Nano 8GB | |
| AI算力 (INT8) | **34** TOPS | **67** TOPS |
| GPU | **512** 核 CUDA核心 **16** 个 Tensor Core GPU@1020MHz | **1024** 核 CUDA核心 **32** 个 Tensor Core GPU@1020MHz |
| CPU | 6x A78 @ 1.7GHz | 6x A78 @ 1.7GHz |
| 内存 | LPDDR5 **4GB** | LPDDR5 **8GB** |
| 功率 | 7W | 15W | 25W | 7W | 15W | 25W |
| 接口类型 | 规格详情 |
|---|---|
| **CSI 摄像头接口** | •2x MIPI CSI-2 22 针摄像头连接器 |
| **PCIe 接口** | •M.2 Key M 插槽,支持 x4 PCIe 3.0 •M.2 Key M 插槽,支持 x2 PCIe 3.0 •M.2 Key E 插槽(已预装网卡) |
| **USB 接口** | • 4 x USB 3.2 Gen 2 (10Gbps) 接口 • USB Type-C UFP |
| **网络接口** | • 1 个千兆以太网 (GbE) 接口 |
| **显示输出** | •1x DisplayPort 1.2 (+MST) 连接器 |
| **存储接口** | • 支持外部 NVMe 存储 • 支持SD卡 |
| **扩展接口** | • 40 针扩展接头: \- 3x UART \- 2x SPI \- 2x I2S(音频) \- 4x I2C \- 1x CAN(控制器局域网) \- DMIC(数字麦克风) \- DSPK(数字扬声器) \- PWM(脉冲宽度调制) \- GPIO(通用输入输出) • 12 针调试接口 • 4 针风扇接头 • DC电源接口 |
| **无线连接** | • 支持WLAN 802.11ac • 支持蓝牙5.0 |
开发板允许电源为 9~19V 5A MAX,请使用官方原装电源接入开发板,以免损坏载板和核心卡。
请确认核心卡的散热器工作状态,以免模组过热导致性能下降。确保散热器安装稳固且无杂物阻碍,如有需要可定期清理灰尘以保障散热效果。
在上电开机前请确保开发板已经接入 USB/固态硬盘/eMMC/内存卡等存储介质。
# 二、刷机教程 ### 1. 安装ubuntu虚拟机 ##### 1.1 下载VMware Workstation - 通过百度网盘下载此文件:VMware-workstation-full-16.2.5-20904516.exe 链接: https://pan.baidu.com/s/1xopblFgG29dYZXoNfwa5ZA 提取码: frjy ##### 1.2 安装VMware Workstation - 打开VMware-workstation-full-16.2.5-20904516.exe [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-09-14-51-05.png) - 选项保持默认即可,点下一步 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-09-14-56-52.png) - 输入激活码,请自行百度搜索:vmware16密钥 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-09-14-59-23.png) ##### 1.3安装ubuntu系统推荐使用20.04和22.04版本,这里以20.04为例。
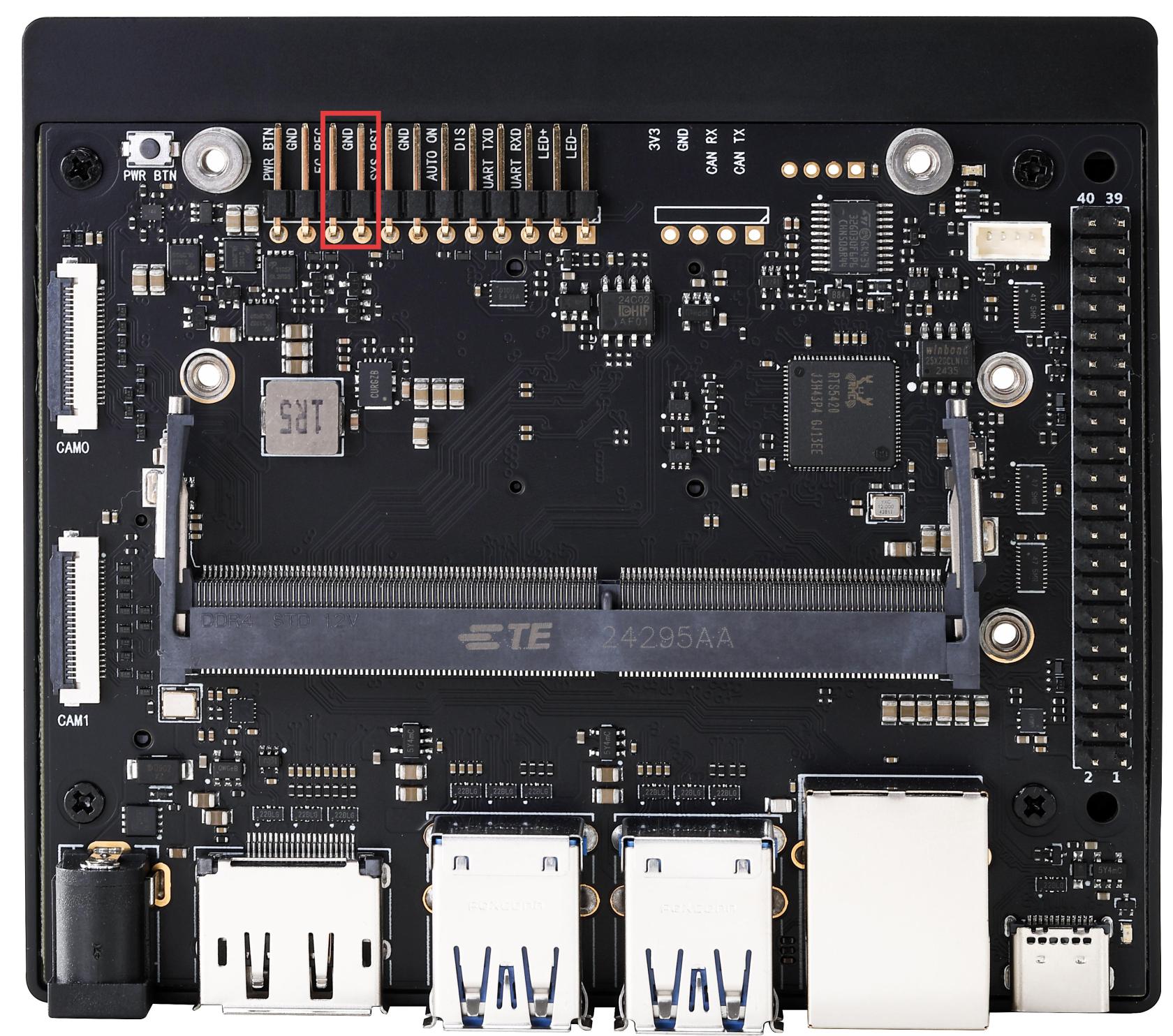
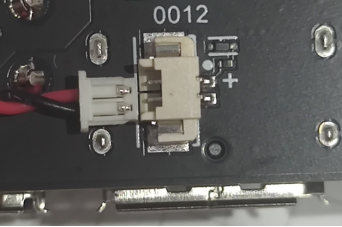
- 下载[ubuntu20.04\_desktop\_amd64.iso](https://releases.ubuntu.com/focal/ubuntu-20.04.6-desktop-amd64.iso)镜像,若下载速度较慢,推荐使用[清华源](https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/focal/ubuntu-20.04.6-desktop-amd64.iso)或[中科大源](https://mirrors.ustc.edu.cn/)。 - 打开VMware Workstation Pro,新建虚拟机 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-21-48.png) - 选择典型配置 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-32-12.png) - 选择刚才下载的ISO镜像 [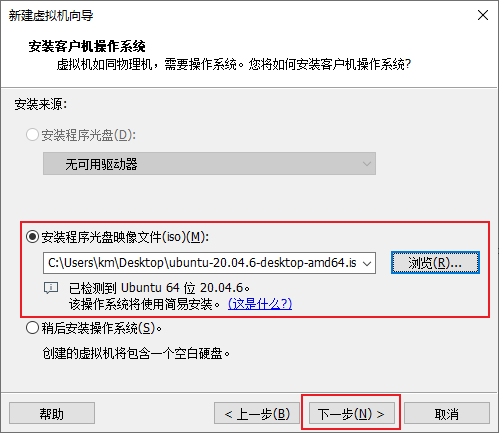](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-33-59.png) - 输入用户名与密码 [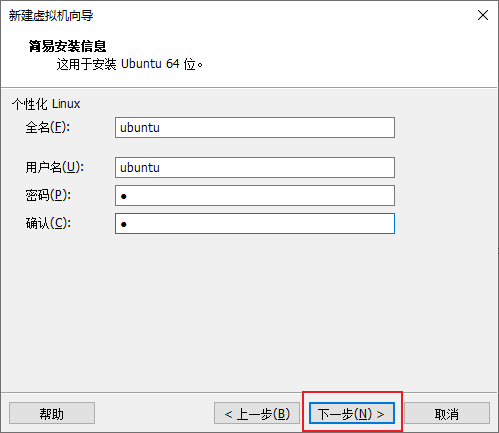](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-37-32.png) - 输入虚拟机名字与选择存放虚拟机文件的路径 [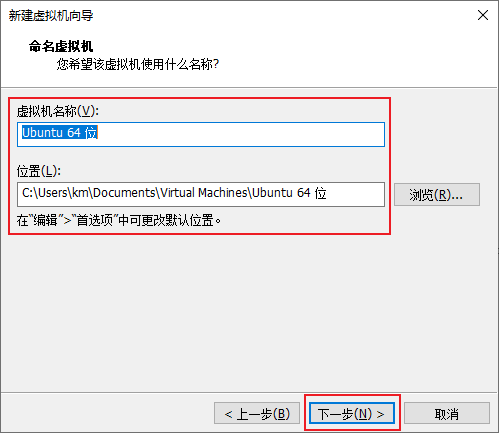](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-38-12.png) - 虚拟机可用的存储空间,建议最少给300G [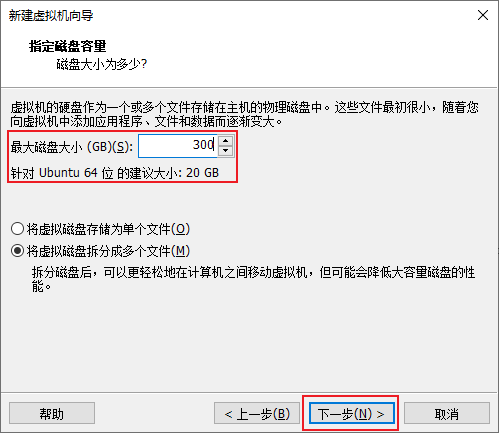](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-40-38.png) - 点击完成 [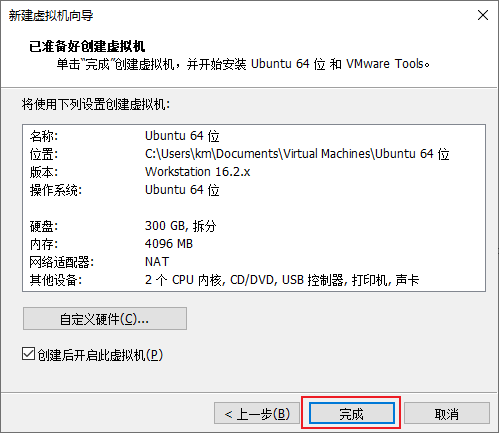](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-41-54.png) - 等待安装完成 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-51-19.png) - 出现以下画面表示安装完成 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-06/snipaste-2025-06-11-15-58-36.png) ### 2.安装NVIDIA SDK Manager ##### 2.1 下载安装包 - 进入虚拟机打开浏览器,进入 [Jetson SDK](https://developer.nvidia.com/sdk-manager),下载 **.deb ubuntu** 安装包。 ##### [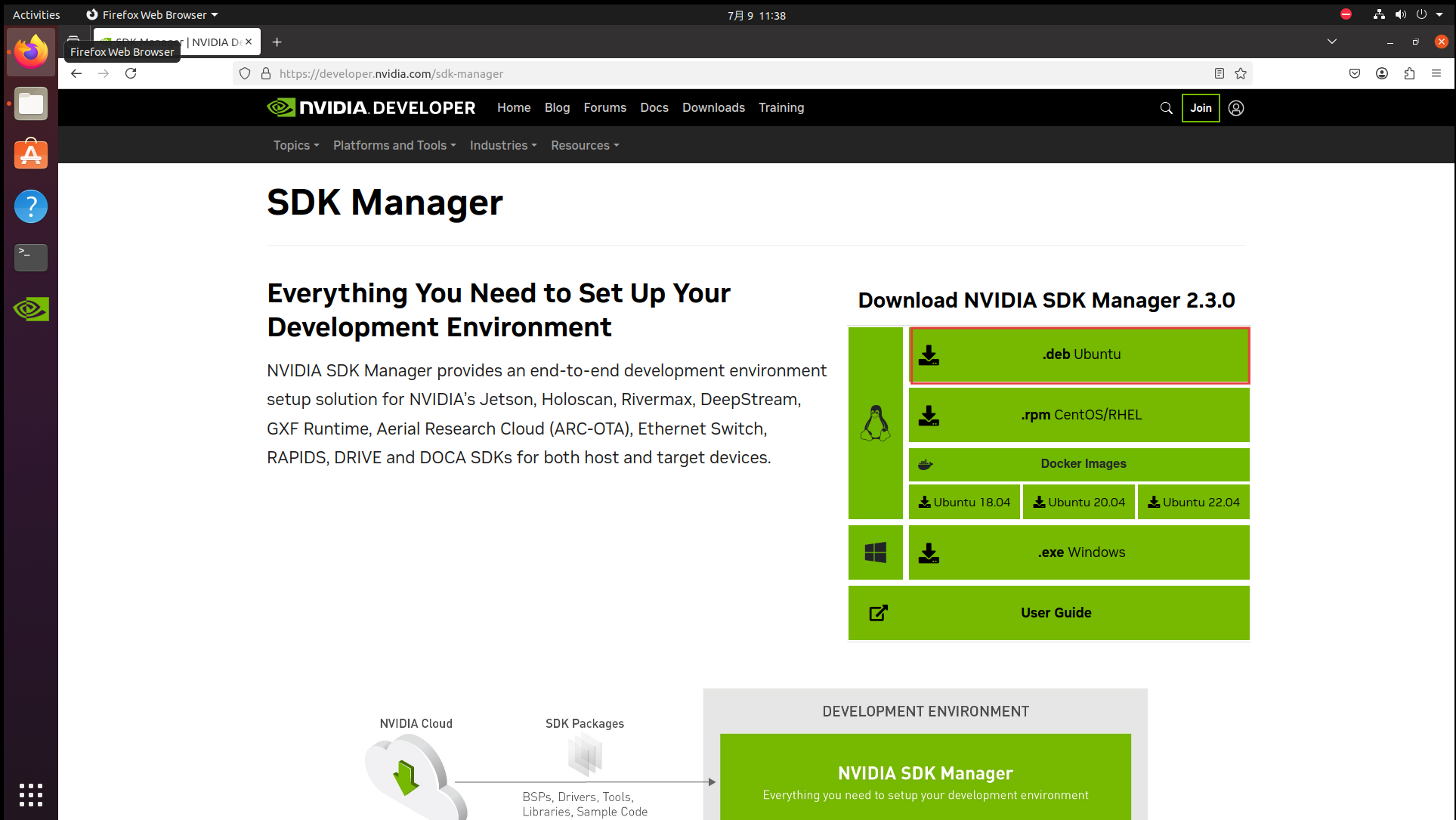](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/1.png) ##### 2.2 安装SDK Manager - 打开 文件管理器 进入 **Downloads** 文件夹,确认 **sdkmanager\_xxxxx\_amd64.deb** 存在,在当前目录下打开命令行窗口执行以下命令安装。 ```bash sudo apt update sudo dpkg -i sdkmanager_2.3.0-12617_amd64.deb # 需要根据实际版本修改包名 sudo apt install --fix-broken ``` [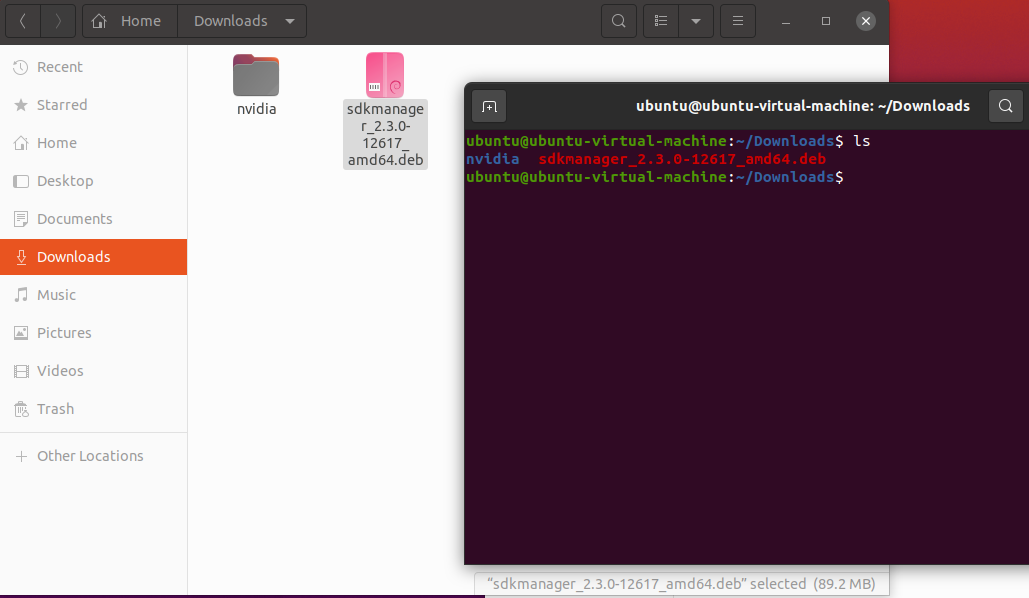](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/12.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/ZDbimage.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/f6Eimage.png) ### 3.使用NVIDIA SDK Manager进行刷机 ##### 3.1 设置VMware的USB模式 - 将USB连接模式设置为 **`将设备连接到前台虚拟机`,避免刷机中途开发板重启导致失败。** ##### [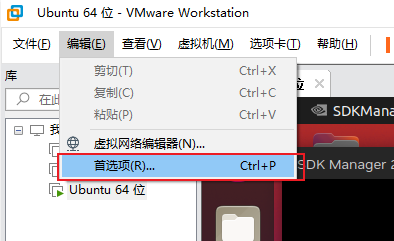](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/4.png) [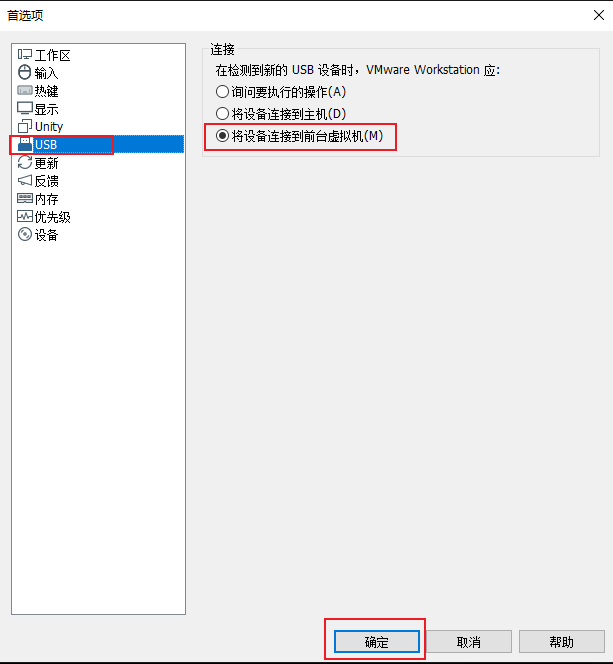](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/5.png) ##### 3.2 进入恢复模式 - 1. 使用跳线帽短接开发板上的 **FC REC** 和 **GND** 针脚。 2. 使用 **USB to Tpye-C** 数据线将开发板连接到电脑。 3. 接通开发板的 DC 电源。 成功进入恢复模式后, SDK Manager 会自动检测到核心卡类型,并提示选择套件类型,同时散热器风扇不会工作。进入恢复模式后一段时间内不操作会重启进入系统,请注意操作时机。
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/0q7a9416.jpg) [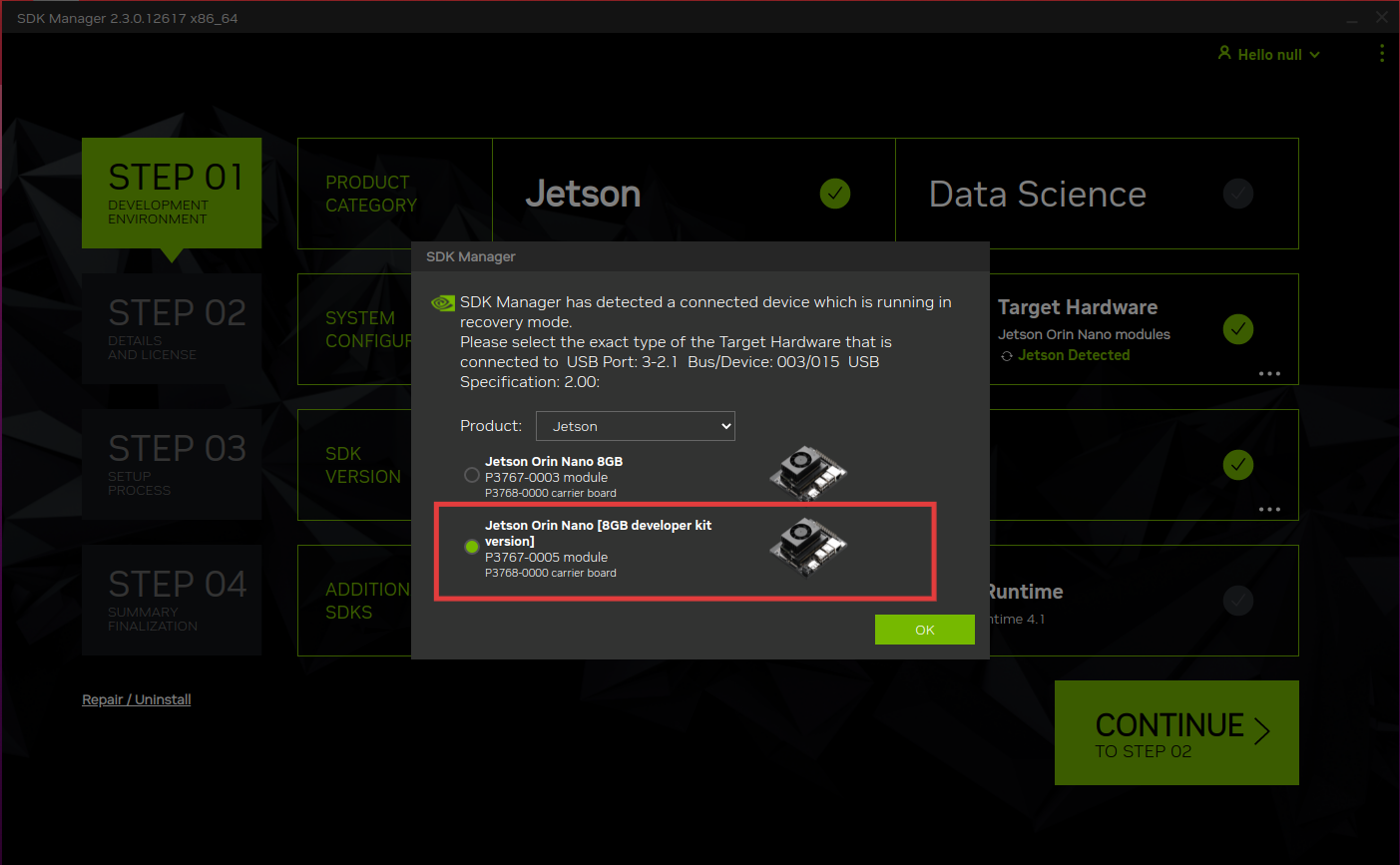](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/14.png) ##### 3.3 配置SDK - 取消Host Machine,并点击CONTINUE [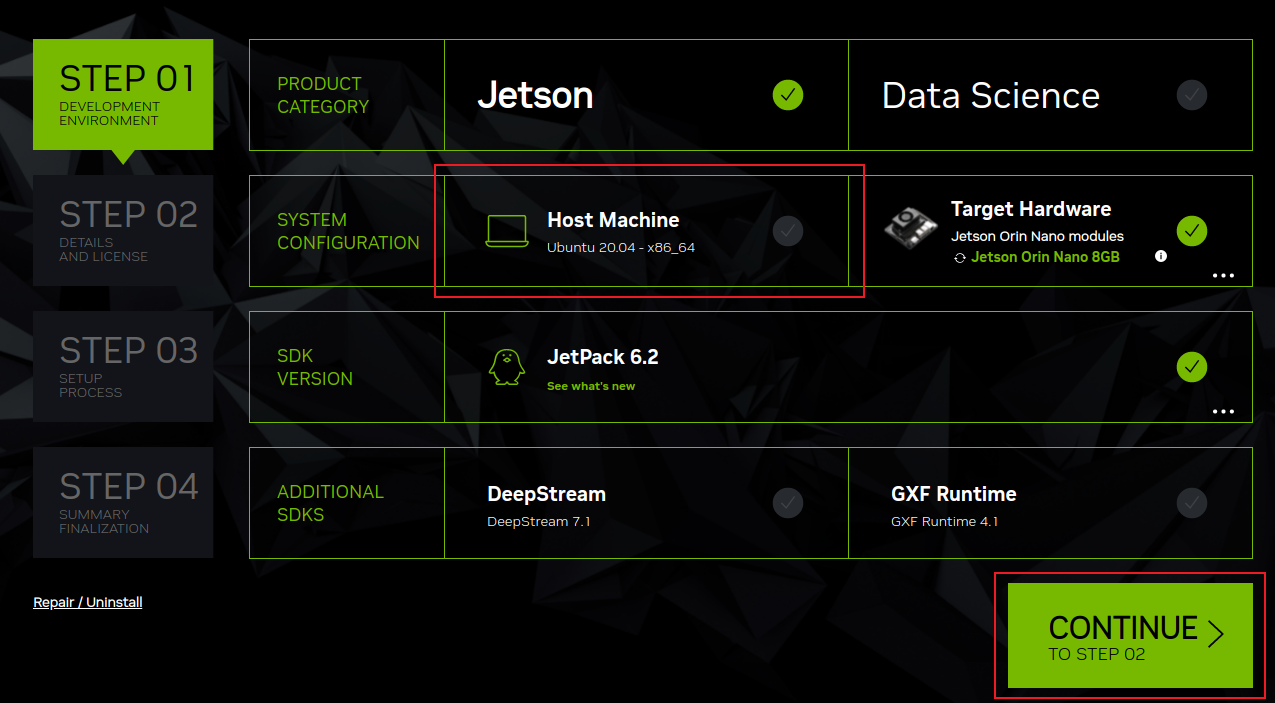](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/B3Uimage.png) - 只勾选Jetson Linux [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/15.png) ##### 3.4 等待下载完成 [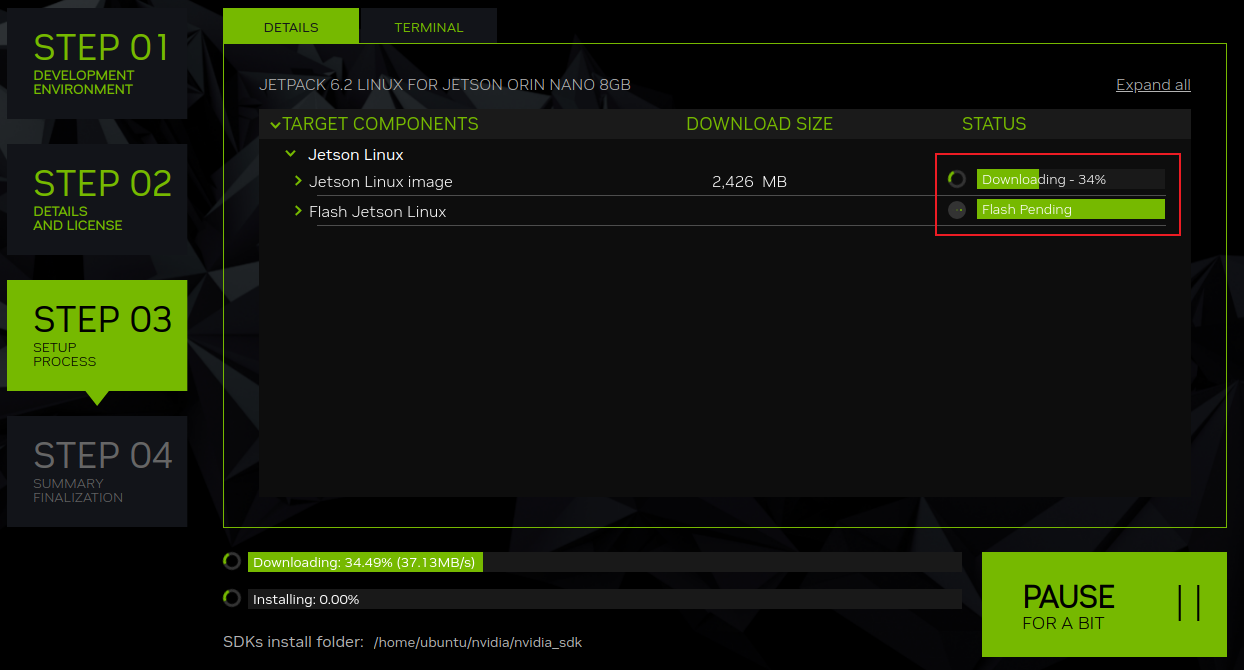](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/3k6image.png) ##### 3.5 配置刷机参数 Pre-Config,预设账号密码 Runtime,开机后自行配置账号密码 Storage Device,系统刷入的介质,根据不同设备自行选择 (内存卡/固态硬盘/U盘)。 [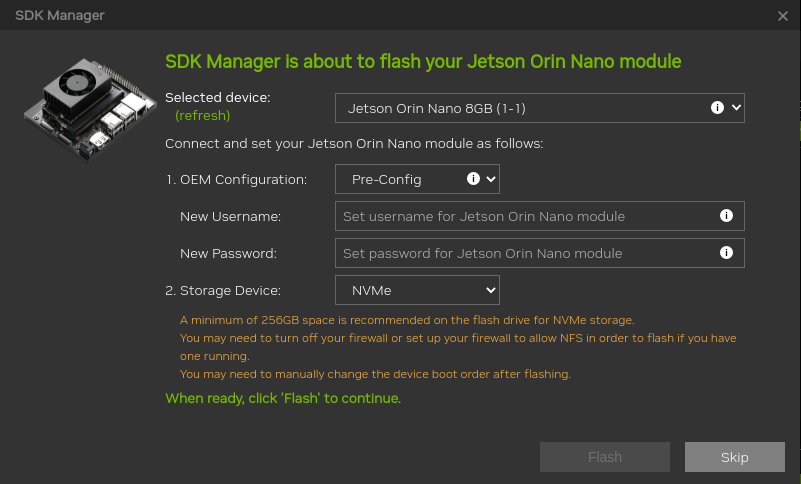](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/XjOimage.png) - 选择`developer kit version`。 [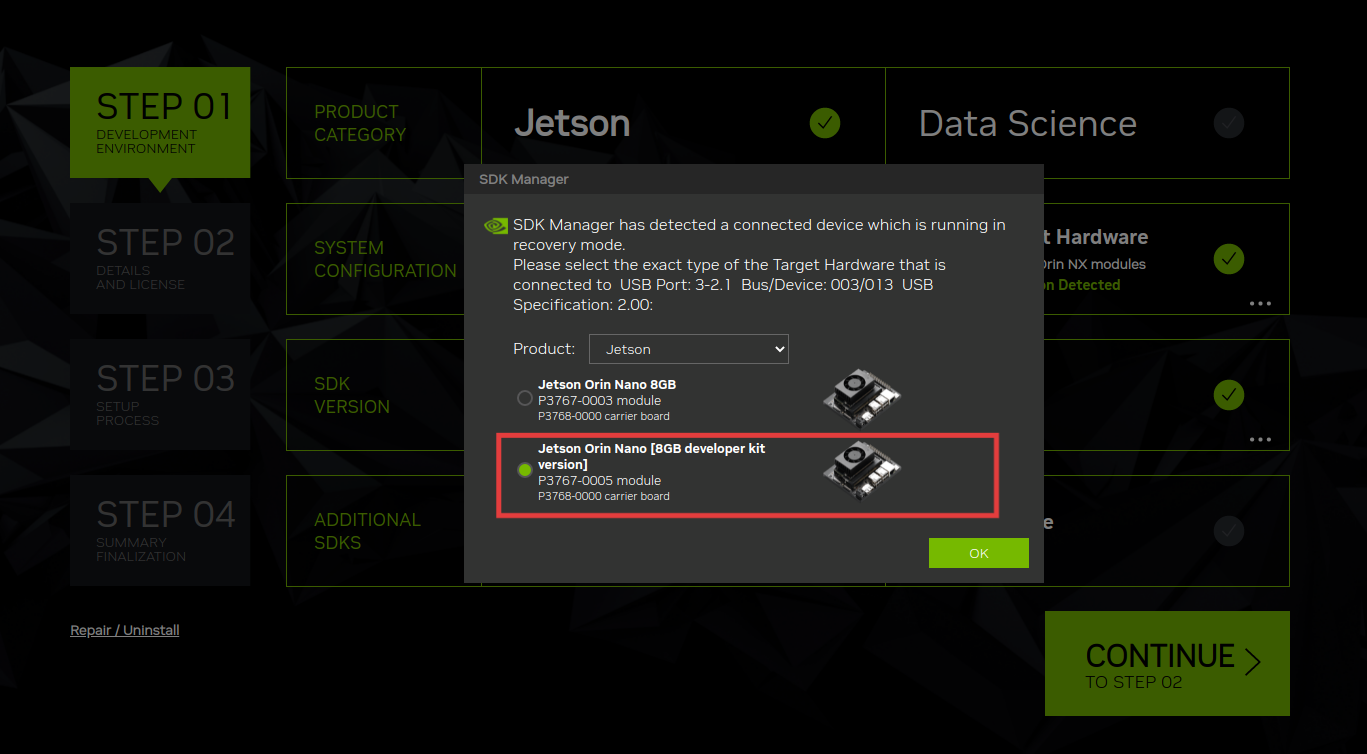](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/JBF12.png) - 耐心等待刷机完成,大约10~20分钟。刷入过程中开发板可能会多次与主机重新连接,请勿途中拔开数据线或切断开发板电源,可以在识别到开发板类型以后就拔掉跳线帽。
[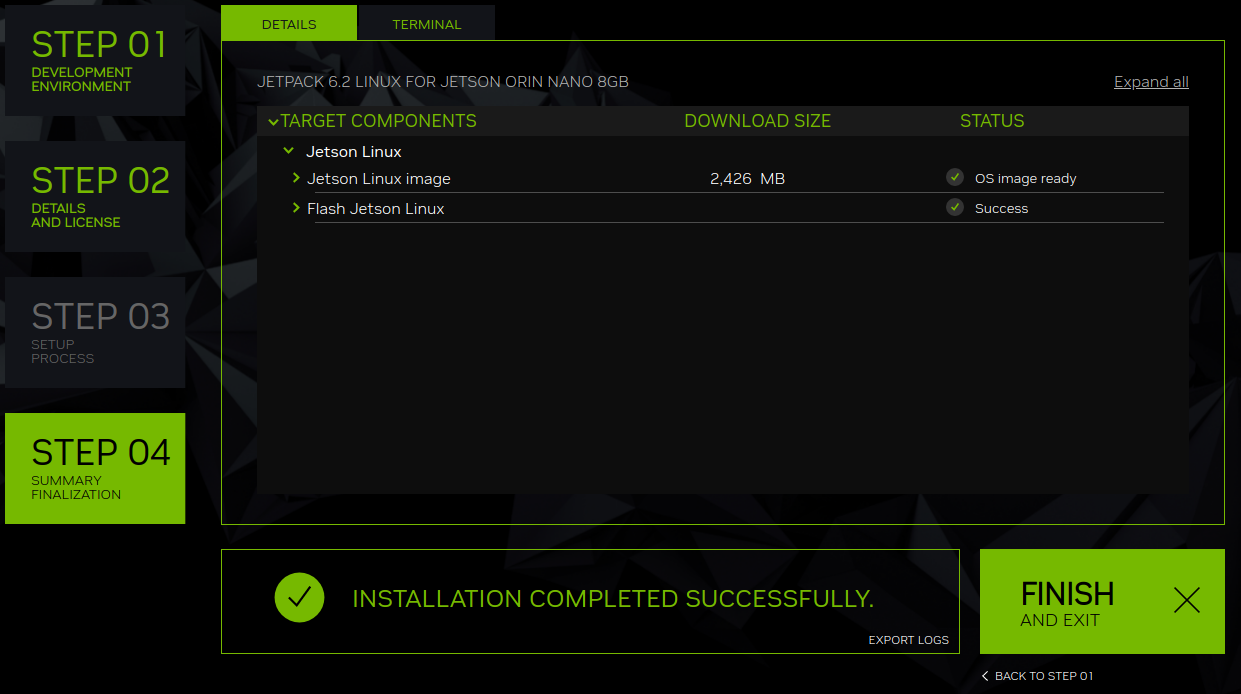](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/ftEimage.png) - 刷入完成后,拔掉跳线帽,上电正常进入系统桌面或初始化设置页面即刷机成功。 [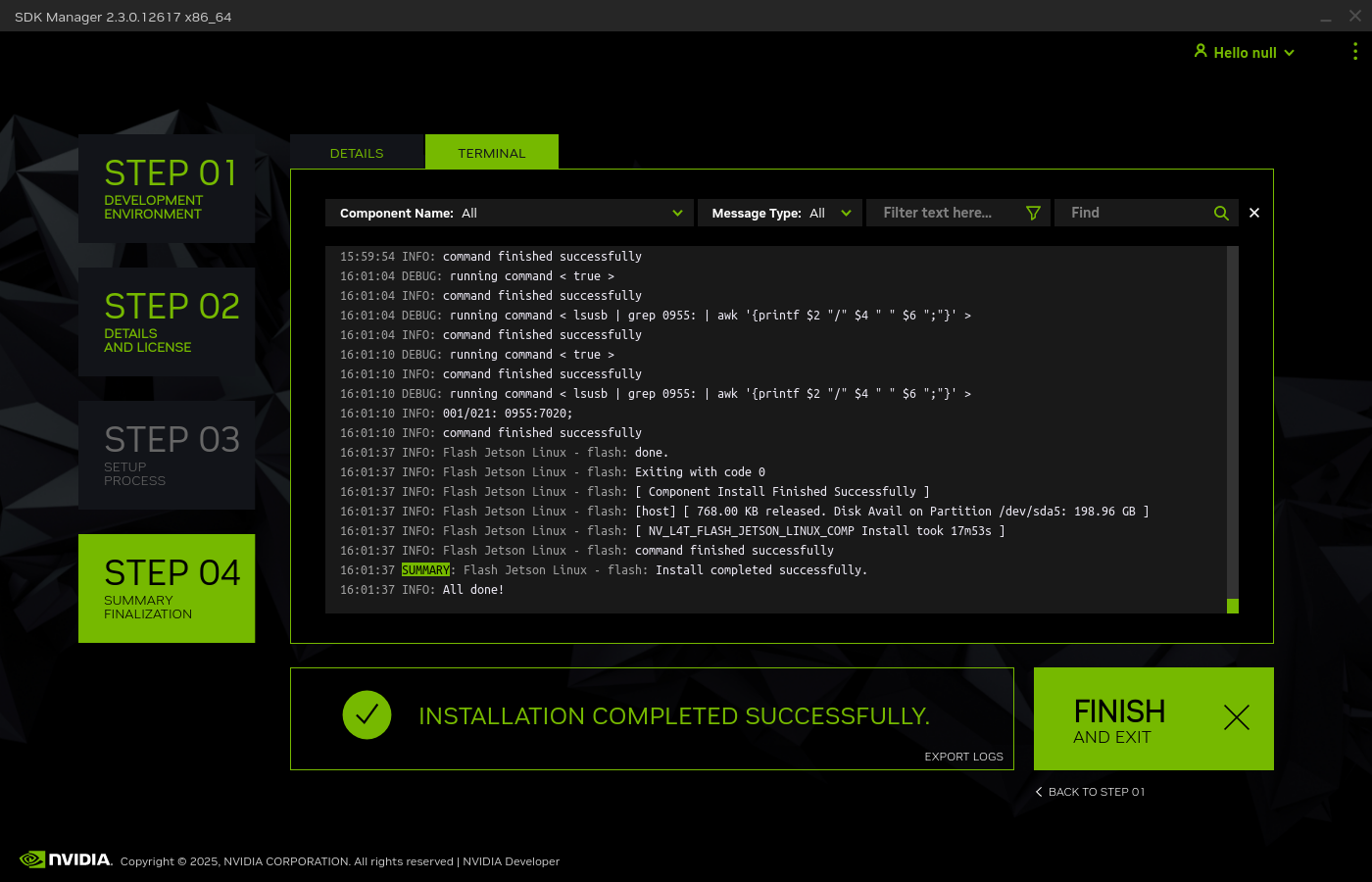](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/6.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/7.png) ### 4.使用命令行刷入super固件此操作需依赖官方固件环境,请先通过SDK Manager完成至少一次完整的烧录以创建固件缓存。
##### 4.1 进入恢复模式 - 使用跳线帽短接**FC REC**和**GND**针脚,使用**Tpye-C**型数据线连接至电脑并接通开发板电源,使开发板进入恢复模式。 ##### 4.2 使用官方固件进行命令行刷机操作前请关闭正在运行的SDK Manager软件,刷入过程约为10~20分钟
- JetPack6.2版本刷入指令: ```bash cd /home/ubuntu/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra #仅供参考,需要根据实际版本和路径进行修改 sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \ -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \ --showlogs --network usb0 jetson-orin-nano-devkit-super internal ``` - JetPack5.1.5版本刷入指令: ```bash cd /home/ubuntu/nvidia/nvidia_sdk/JetPack_5.1.5_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra #仅供参考,需要根据实际版本和路径进行修改 sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1\ -c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml"\ --showlogs --network usb0 jetson-orin-nano-devkit-super internal ``` [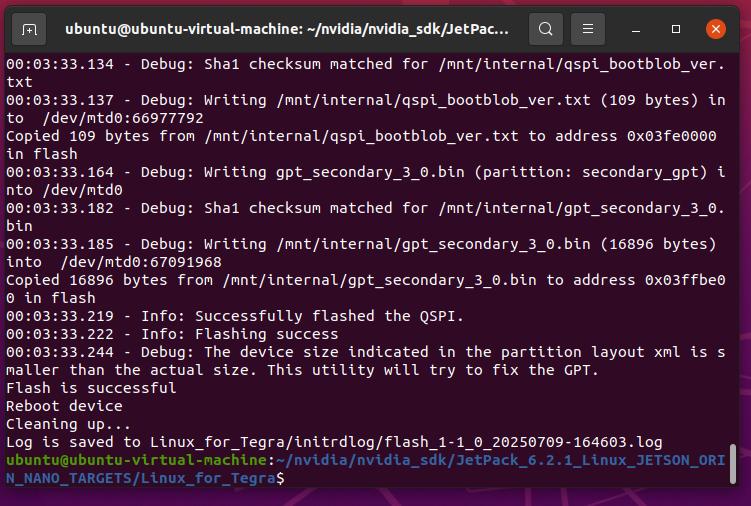](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/8.png) ##### 4.3 验证是否处于super模式 - 开发板上电开机完成用户配置后在桌面右上角可以选择电源模式,**25W** & **MAXN** **SUPER**为super模式独有,普通模式只有 **7W** 和 1**5W** 两档。 [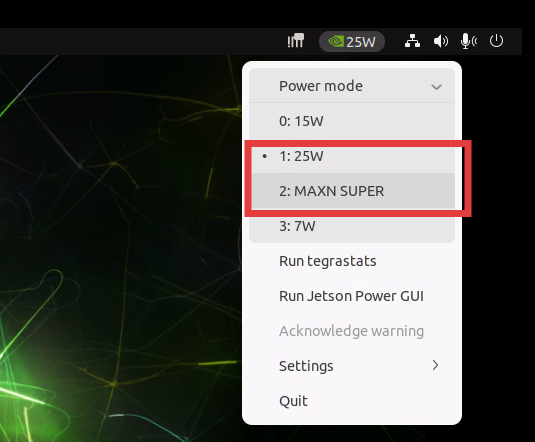](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/9.png) ### 4.备份与恢复现有固件 ##### 4.1备份固件 - 使用跳线帽短接**FC REC**和**GND**针脚,使用**Tpye-C**型数据线连接至电脑并接通开发板电源,使开发板进入恢复模式。 或者在正常开机状态下连接到主机,输入以下命令重启到恢复模式 ```bash sudo reboot -f forced-recovery ``` - 进入到原刷机固件缓存下的命令行目录。 ```bash cd /home/ubuntu/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra #仅供参考,需要根据实际版本和路径进行修改 ``` - 主机上安装依赖包 ```bash sudo apt-get install qemu-user-static libxml2-utils abootimg sshpass nfs-kernel-server binutils ``` - 备份命令 ```bash sudo ./tools/backup_restore/l4t_backup_restore.sh -b -e nvme0n1 jetson-orin-nano-devkit-nvme ``` - 恢复命令 ```bash sudo ./tools/backup_restore/l4t_backup_restore.sh -r -e nvme0n1 jetson-orin-nano-devkit-nvme ``` 若您使用第三方载板恢复备份需要修改`nvrestore_partitions.sh`注释掉 **292~296行** 的内容 [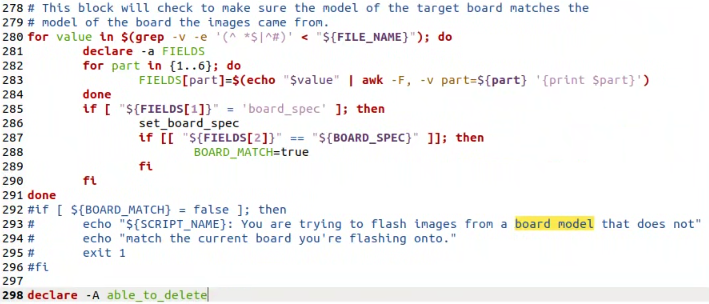](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/VXwimage.png) # 三、摄像头 - 接入摄像头后,您可以使用以下指令查看现有摄像头的编号。 ```bash jetson@jetson-desktop:~$ ls /dev/video* /dev/video0 /dev/video1 ``` #### 1. CSI摄像头尽量避免带电操作,接入CSI摄像头时注意FPC排线金属触点一面朝下
##### 1.1 使用gst-launch打开摄像头 - 确认CSI摄像头正确连接后,分别在两个命令行窗口运行以下命令打开摄像头。 ```bash gst-launch-1.0 nvarguscamerasrc sensor-id=0 ! "video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,format=(string)NV12, framerate=(fraction)30/1" ! nvvidconv ! xvimagesink sync=false gst-launch-1.0 nvarguscamerasrc sensor-id=1 ! "video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,format=(string)NV12, framerate=(fraction)30/1" ! nvvidconv ! xvimagesink sync=false #打开另一个命令行窗口运行 ``` - **sensor-id**:指定摄像头物理接口 ID,双摄使用 `sensor-id=0` 和 `sensor-id=1`。 - **memory**:使用 NVIDIA GPU 内存(NVMM),减少延迟。 - **width, height**:设置分辨率,需硬件支持,例如 1080p。 - **format**:像素格式为 `NV12`(NVIDIA 编码器原生支持)。 - **framerate**:设置帧率,例如 `30/1`(30 FPS)。 - **sync**:`false` 禁用音视频同步,减少延迟。 [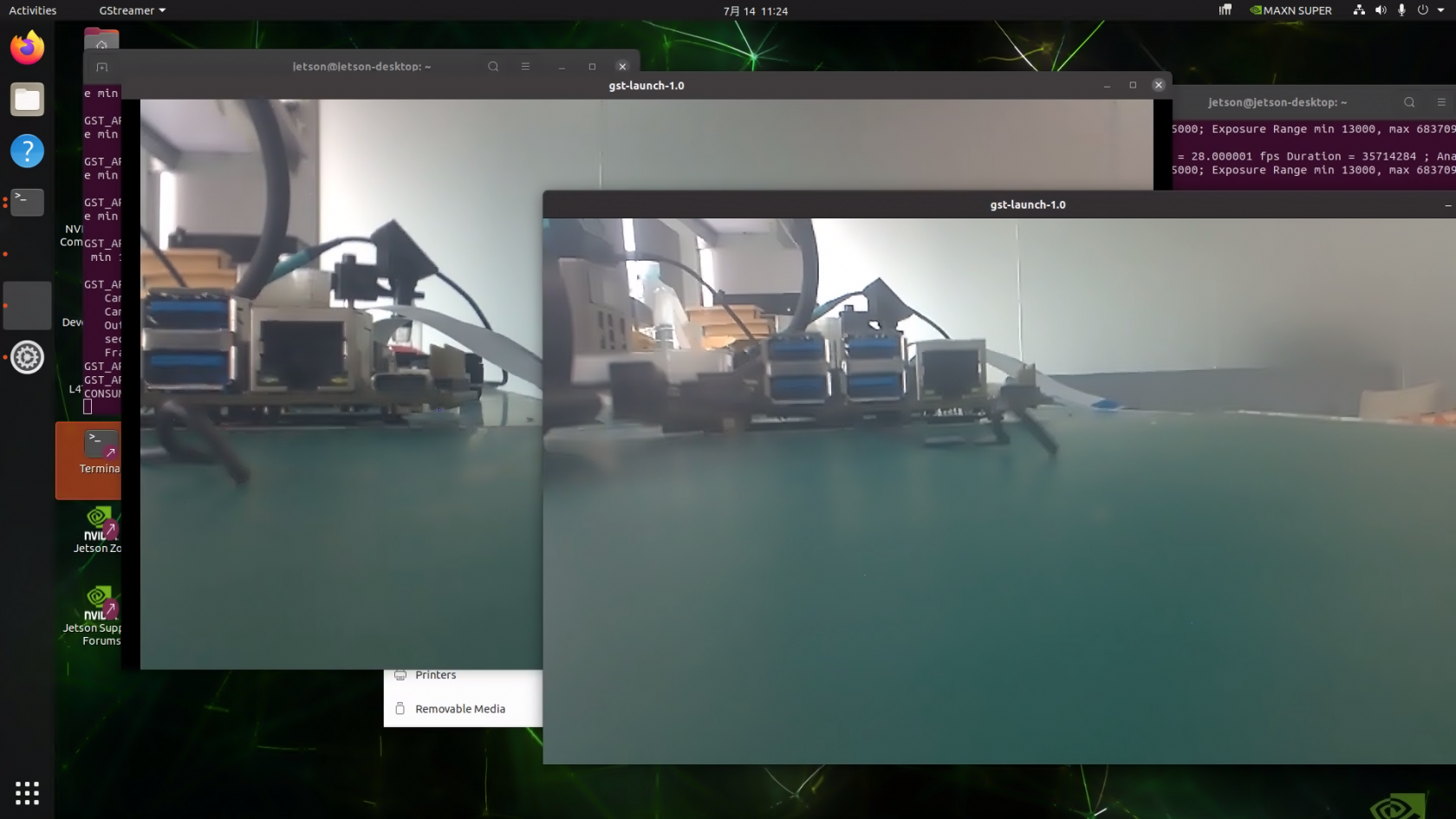](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/fXv4.png) #### 2. USB摄像头 - Cheese是一款简单易用的摄像头应用,它允许用户在Ubuntu系统中轻松地进行拍照、录像以及连拍等操作。运行以下命令以安装Cheese软件。 ```bash sudo apt install cheese ``` [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/IVR1.png) 将USB摄像头连接至开发板USB接口,并打开cheese软件 [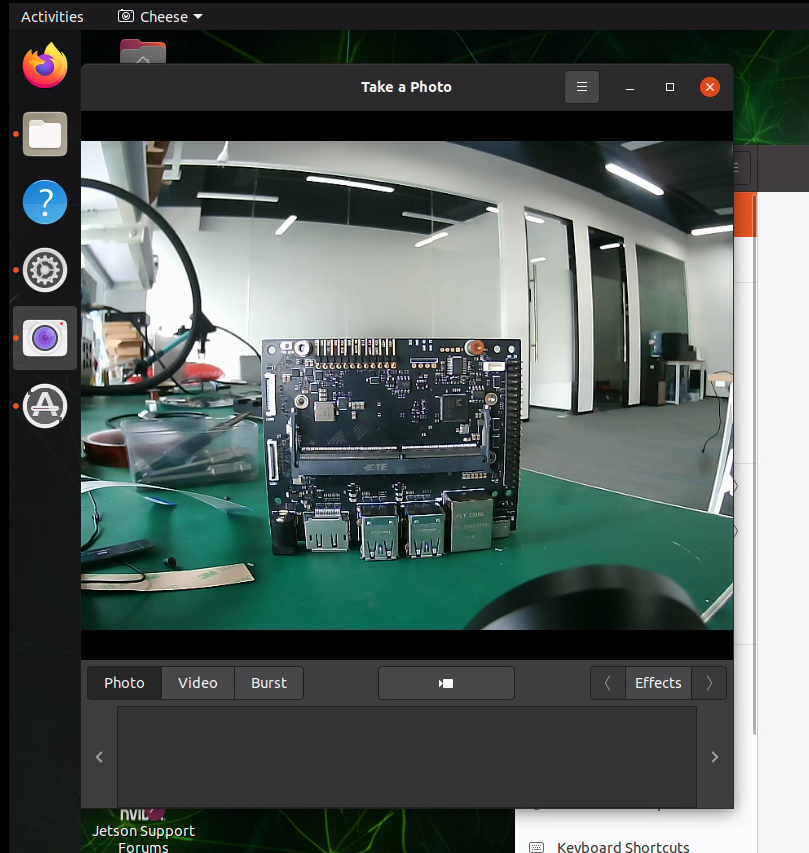](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/Goj3.png) --- - Guvcview是一款开源的图形用户界面软件,它为用户提供了简单直观的方式来捕捉视频。运行以下命令以安装guvcview软件。 ```bash sudo apt install guvcview ``` [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/HZH7.png) [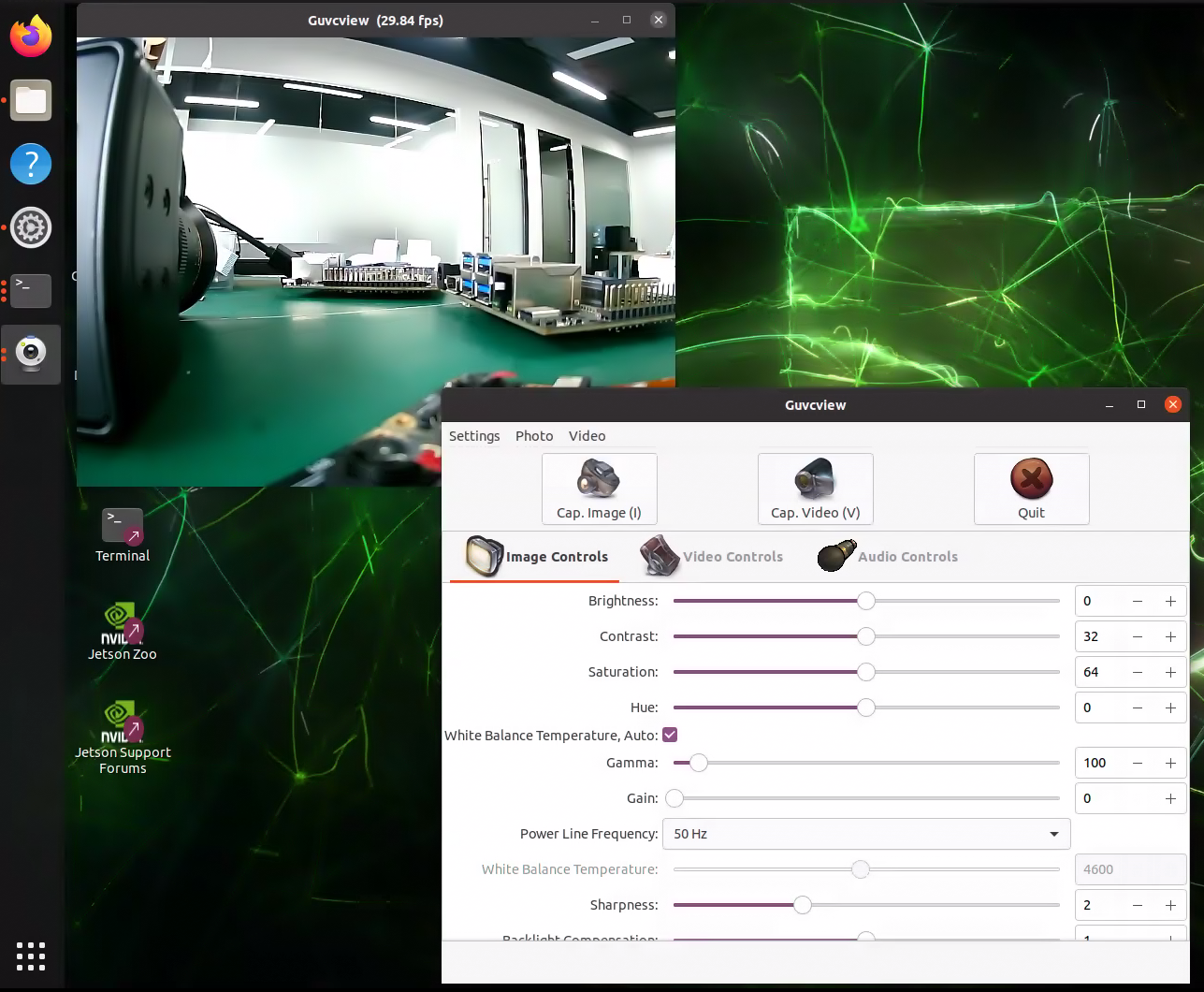](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/FWh8.png) 您也仍然可以使用nvgstcapture来打开USB摄像头 ```bash # V4L2 USB camera (where更详细的说明可参考[NVIDIA Developer](https://developer.nvidia.com/embedded/learn/tutorials/first-picture-csi-usb-camera)
# 四、GPIO控制 GPIO(General-purpose input/output )是一种通用型输入输出接口,其脚位可由使用者编程控制。根据实际需要,这些脚位可以被设置为通用输入(GPI)、通用输出(GPO),或兼具输入输出功能(GPIO)。Jetson Orin Nano系列的40PIN GPIO引脚定义如下:[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/jetson-orin-nano-expansion-header-j12-pinout.jpeg)
### 1 在JetPack 5系统中使用GPIO #### 1.1 使用命令行控制GPIO ##### 获取GPIO口的引脚名称与编号 以31号引脚为例,454为GPIO口编号,PQ.06为引脚名称 - 提升至root权限,启用GPIO口 ```bash sudo bash echo 454 > /sys/class/gpio/export ``` - 设置GPIO为输入模式 ```bash echo in > /sys/class/gpio/PQ.06/direction ``` - 获取GPIO当前状态,返回值1为高电平,0为低电平 ```bash cat /sys/class/gpio/PQ.06/value ``` - 设置GPIO为输出模式 ```bash echo out > /sys/class/gpio/PQ.06/direction ``` - 设置GPIO输出,1为高电平,0为低电平 ```bash echo 1 > /sys/class/gpio/PQ.06/value ``` 您也可以使用以下脚本进行测试 ```bash #!/bin/bash trap 'echo PQ.06 > /sys/class/gpio/unexport; echo "GPIO PQ.06 is released"' EXIT echo "setting GPIO PQ.06" echo PQ.06 > /sys/class/gpio/export 2>/dev/null # set Pin output mode echo out > /sys/class/gpio/PQ.06/direction # blink while true do echo 0 > /sys/class/gpio/PQ.06/value sleep 0.5 cat /sys/class/gpio/PQ.06/value sleep 0.5 echo 1 > /sys/class/gpio/PQ.06/value sleep 0.5 cat /sys/class/gpio/PQ.06/value sleep 0.5 done ``` #### 1.2 使用python控制GPIO ##### 1.2.1 安装JETSON.GPIO包 - 如果您不确定您的环境是否正常,或者您尝试使用**conda**环境运行脚本请执行以下指令安装Jetson官方的GPIO库 ```python pip install JETSON.GPIO ``` Jetson GPIO库提供了四种给I / O引脚编号的方法。 - **BOARD**:物理引脚编号(40针接口顺序)。 - **BCM**:Broadcom SoC 的 GPIO 编号(**常用**)。 - **CVM**:CVM/CVB 连接器的信号名称。 - **TEGRA\_SOC**:Tegra SoC 信号名称。 ```python import time import RPi.GPIO as GPIO # define pin number output_pin = 31 # set pin as BOARD mode GPIO.setmode(GPIO.BOARD) # set pin mode GPIO.setup(output_pin, GPIO.OUT) print("Press CTRL+C to exit") curr_value = GPIO.HIGH try: while True: time.sleep(1) print("pin {} now is {}".format(output_pin, curr_value)) GPIO.output(output_pin, curr_value) # blink curr_value ^= GPIO.HIGH finally: GPIO.cleanup() ``` 其他具体用法和例程可参考[项目官网](https://sourceforge.net/p/raspberry-gpio-python/wiki/Examples/) #### 1.3使用C/C++控制GPIO - 安装libgpio-dev ``` sudo apt install libgpio-dev ``` 参考例程: ```c++ /** * License - MIT. */ #include在JetPack6 系统中仍需要修改寄存器内容来更改引脚GPIO模式以使用高级语言控制GPIO
- 将 PQ.06 引脚设置为输出模式 ```bash sudo busybox devmem 0x2430070 w 0x004 ``` - 如果您尝试使用 conda 环境运行脚本请执行以下指令安装 Jetson 官方的 GPIO 库 ```python pip install JETSON.GPIO ``` - 建议执行以下指令,重新安装系统自带的 JETSON.GPIO 库 ```bash sudo rm -rf /usr/lib/python3*/dist-packages/Jetson sudo rm -rf /usr/local/lib/python3*/dist-packages/Jetson git clone https://github.com/NVIDIA/jetson-gpio.git cd jetson-gpio sudo pip3 install . ``` Jetson GPIO 库提供了四种给I / O引脚编号的方法。 - **BOARD**:物理引脚编号(40针接口顺序)。 - **BCM**:Broadcom SoC 的 GPIO 编号(**常用**)。 - **CVM**:CVM/CVB 连接器的信号名称。 - **TEGRA\_SOC**:Tegra SoC 信号名称。 ```python import time import RPi.GPIO as GPIO # define pin number PQ.06 output_pin = 31 # set pin as BOARD mode GPIO.setmode(GPIO.BOARD) # set pin mode GPIO.setup(output_pin, GPIO.OUT) print("Press CTRL+C to exit") curr_value = GPIO.HIGH try: while True: time.sleep(1) print("pin {} now is {}".format(output_pin, curr_value)) GPIO.output(output_pin, curr_value) # blink curr_value ^= GPIO.HIGH finally: GPIO.cleanup() ``` 其他具体用法和例程可参考[项目官网](https://sourceforge.net/p/raspberry-gpio-python/wiki/Examples/) #### 2.3使用C/C++控制GPIO在JetPack6 系统中仍需要修改寄存器内容来更改引脚GPIO模式以使用高级语言控制GPIO
- 将 PQ.06 引脚设置为输出模式 ```bash sudo busybox devmem 0x2430070 w 0x004 ``` - 安装libgpio-dev ``` sudo apt install libgpiod-dev ``` 参考例程: ```c++ /** * License - MIT. */ #include官方套件不支持RTC功能
载板RTC电池连接器型号为MX1.25-2P,使用电池时,请确认好极性,禁止接反电池
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/gfZimage.png) - 检查系统时间是否正确 ```bash timedatectl status ``` - 同步网络时间 ``` sudo apt install ntpdate sudo ntpdate cn.pool.ntp.org ``` - 设置时区 ``` sudo timedatectl set-timezone Asia/Shanghai ``` - 同步系统时间到RTC硬件 ``` sudo hwclock --systohc --utc --rtc /dev/rtc0 --noadjfile ``` - 检查RTC硬件时间 ``` sudo hwclock --show --utc --rtc /dev/rtc0 --noadjfile ``` - 设置开机自动同步RTC时间 1. 打开文件 ``` sudo vi /lib/systemd/system/hwrtc.service ``` 2.写入以下内容 ```bash [Unit] Description=Synchronise System clock to hardware RTC DefaultDependencies=no After=systemd-modules-load.service Before=systemd-journald.service systemd-fsck-root.service time-sync.target sysinit.target shutdown.target Conflicts=shutdown.target [Service] Type=oneshot RemainAfterExit=yes ExecStart=/sbin/hwclock --hctosys --utc --rtc /dev/rtc0 --noadjfile RestrictRealtime=yes [Install] WantedBy=sysinit.target ``` 3.设置开机自启动服务 ``` sudo systemctl enable hwrtc.service ``` - 手动RTC硬件同步到系统时间 ``` sudo hwclock --hctosys --utc --rtc /dev/rtc0 --noadjfile ``` - 关闭网络同步时间 ``` sudo timedatectl set-ntp false ``` # Orin Nano/NX USB配置说明 ### 一、Jetson Orin Nano配置方法 #### 1. JetPack 5.1.5配置方法 ##### 1. 1刷入**JetPack 5.1.5**系统。 参考[官方固件刷机流程](https://www.linkzeelabs.com/wiki/books/jetson-orin-nano/page/75887) ##### 1.2 将设备树文件下载到开发板 设备正常开机后,打开终端命令行,将**修改后的设备树文件**下载到开发板。 ```bash git clone https://gitee.com/kongyuantech/document.git cd document/AN002\ Orin\ Nano\ NX\ USB配置/5.1.4/ ``` ##### 1.3 使用命令行替换设备树。 选择执行以下命令替换**DTB设备树**文件并重启设备。 - **Jetson Orin Nano 4G** 请使用以下代码 ``` sudo cp /boot/dtb/kernel_tegra234-p3767-0004-p3768-0000-a0.dtb /boot/dtb/kernel_tegra234-p3767-0004-p3768-0000-a0.dtb.backup # 备份原设备树文件 sudo cp kernel_tegra234-p3767-0004-p3768-0000-a0.dtb /boot/dtb sudo chown 0:0 /boot/dtb/kernel_tegra234-p3767-0004-p3768-0000-a0.dtb sudo chmod 644 /boot/dtb/kernel_tegra234-p3767-0004-p3768-0000-a0.dtb sudo reboot ``` - **Jetson Orin Nano 8G** 请使用以下代码 ``` sudo cp /boot/dtb/kernel_tegra234-p3767-0003-p3768-0000-a0.dtb /boot/dtb/kernel_tegra234-p3767-0003-p3768-0000-a0.dtb.backup # 备份原设备树文件 sudo cp kernel_tegra234-p3767-0003-p3768-0000-a0.dtb /boot/dtb sudo chown 0:0 /boot/dtb/kernel_tegra234-p3767-0003-p3768-0000-a0.dtb sudo chmod 644 /boot/dtb/kernel_tegra234-p3767-0003-p3768-0000-a0.dtb sudo reboot ``` #### 2. JetPack 6.2.1配置方法 ##### 2.1 刷入**JetPack 6.2.1**系统。 参考[官方固件刷机流程](https://www.linkzeelabs.com/wiki/books/jetson-orin-nano/page/75887) ##### 2.2 将设备树文件下载到开发板 - 设备正常开机后,打开终端命令行,将**修改后的设备树文件**下载到开发板。 ```bash git clone https://gitee.com/kongyuantech/document.git cd document/AN002\ Orin\ Nano\ NX\ USB配置/6.2/ ``` ##### 1.3 使用命令行替换设备树。 选择执行以下命令**增加DTB设备树**文件并重启设备。 - **Jetson Orin Nano 4G** 请执行以下代码 ``` sudo cp orin_nano_4g.dtb /boot/dtb sudo sed -i 's#console=tty0#console=tty0\n FDT /boot/dtb/orin_nano_4g.dtb#g' /boot/extlinux/extlinux.conf sudo reboot ``` - **Jetson Orin Nano 8G** 请执行以下代码 ``` sudo cp orin_nano_8g.dtb /boot/dtb sudo sed -i 's#console=tty0#console=tty0\n FDT /boot/dtb/orin_nano_8g.dtb#g' /boot/extlinux/extlinux.conf sudo reboot ``` ### 二、Jetson Orin NX配置方法 #### 1. JetPack 5.1.5配置方法 ##### 1. 1刷入**JetPack 5.1.5**系统。 参考[官方固件刷机流程](https://www.linkzeelabs.com/wiki/books/jetson-orin-nano/page/75887) ##### 1.2 将设备树文件下载到开发板 - 设备正常开机后,打开终端命令行,将**修改后的设备树文件**下载到开发板。 ```bash git clone https://gitee.com/kongyuantech/document.git cd document/AN002\ Orin\ Nano\ NX\ USB配置/5.1.4/ ``` ##### 1.3 使用命令行替换设备树。 选择执行以下命令替换**DTB设备树**文件并重启设备。 - **Jetson Orin NX 8G** 请执行以下代码 ``` sudo cp /boot/dtb/kernel_tegra234-p3767-0001-p3768-0000-a0.dtb /boot/dtb/kernel_tegra234-p3767-0001-p3768-0000-a0.dtb.backup # 备份原设备树文件 sudo cp kernel_tegra234-p3767-0001-p3768-0000-a0.dtb /boot/dtb sudo chown 0:0 /boot/dtb/kernel_tegra234-p3767-0001-p3768-0000-a0.dtb sudo chmod 644 /boot/dtb/kernel_tegra234-p3767-0001-p3768-0000-a0.dtb sudo reboot ``` - **Jetson Orin NX 16G** 请执行以下代码 ``` sudo cp /boot/dtb/kernel_tegra234-p3767-0000-p3768-0000-a0.dtb /boot/dtb/kernel_tegra234-p3767-0000-p3768-0000-a0.dtb.backup # 备份原设备树文件 sudo cp kernel_tegra234-p3767-0000-p3768-0000-a0.dtb /boot/dtb sudo chown 0:0 /boot/dtb/kernel_tegra234-p3767-0000-p3768-0000-a0.dtb sudo chmod 644 /boot/dtb/kernel_tegra234-p3767-0000-p3768-0000-a0.dtb sudo reboot ``` #### 2. JetPack 6.2.1配置方法 ##### 2.1 刷入**JetPack 6.2.1**系统。 参考[官方固件刷机流程](https://www.linkzeelabs.com/wiki/books/jetson-orin-nano/page/75887) ##### 2.2 将设备树文件下载到开发板 - 设备正常开机后,打开终端命令行,将**修改后的设备树文件**下载到开发板。 ```bash git clone https://gitee.com/kongyuantech/document.git cd document/AN002\ Orin\ Nano\ NX\ USB配置/6.2/ ``` ##### 2.3 使用命令行替换设备树。 选择执行以下命令**增加DTB设备树**文件并重启设备。 - **Jetson Orin NX 8G** 请使用以下代码 ``` sudo cp orin_nx_8g.dtb /boot/dtb sudo sed -i 's#console=tty0#console=tty0\n FDT /boot/dtb/orin_nx_8g.dtb#g' /boot/extlinux/extlinux.conf sudo reboot ``` - **Jetson Orin NX 16G** 请使用以下代码 ``` sudo cp orin_nx_16g.dtb /boot/dtb sudo sed -i 's#console=tty0#console=tty0\n FDT /boot/dtb/orin_nx_16g.dtb#g' /boot/extlinux/extlinux.conf sudo reboot ```注意:此命令为临时启用,重启会失效。
``` sudo bash -c 'echo device > /sys/class/usb_role/usb2-0-role-switch/role' ``` 设置后,使用Type-C端口连接到PC主机时,具有以下功能 1. COM口,设备的终端命令行 2. 虚拟网卡,设备ip地址默认为:192.168.55.1 3. NCM (Network Control Model),设备可通过PC主机联网,仅支持Linux、Mac - 开机默认配置**Type-C端口**为**Device**模式(永久有效) ``` sudo sed -i 's#exit 0#echo device > /sys/class/usb_role/usb2-0-role-switch/role\nexit 0#g' /opt/nvidia/l4t-usb-device-mode/nv-l4t-usb-device-mode-start.sh ``` # 连接到Jetson系统 Jetson拥有一个HDMI/DP视频输出接口、RJ45网口、Type-C接口和UART调试接口,下面我们将使用上面这四种方法连接到Jetson开发板系统。 #### 1. 连接显示器 使用功能正常的 DP/HDMI 线材连接到功能正常的显示器,接通开发板电源就能正常进入桌面。接入鼠标键盘后即可如普通桌面PC一样操作。 #### 2. 远程登陆此方法需要提前使用SDK Maneger写入用户名和密码
##### 2.1将开发板连接到路由器,并接通电源开机 ##### 2.2-1通过路由器后台获取到开发板ip地址 不同品牌的路由器存在较大差异,请按照设备制造商的指引进行查询 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/fBZimage.png) ##### 2.2-2使用**advanced ip scanner**软件扫描同网段下的设备 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/image.png) 在刷入官方固件时,制造商信息为 **NVIDIA Corporation** 的设备即为开发板。 ##### 2.3 下载安装 **putty** 或 **MobaXterm** 等连接工具(下面以[MobaXterm](https://mobaxterm.mobatek.net/download.html)为例) ##### 2.4 点击 **session** 创建一个会话 [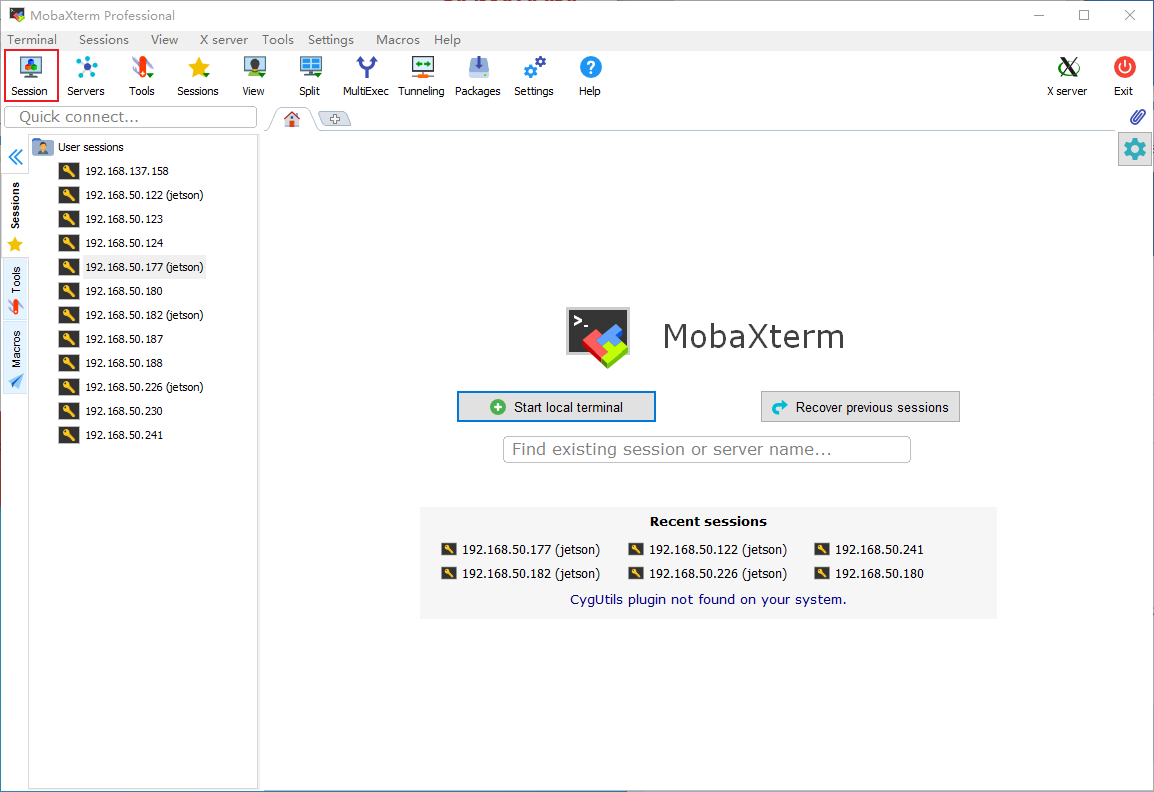](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/rBnimage.png) ##### 2.5 点击 **SSH** [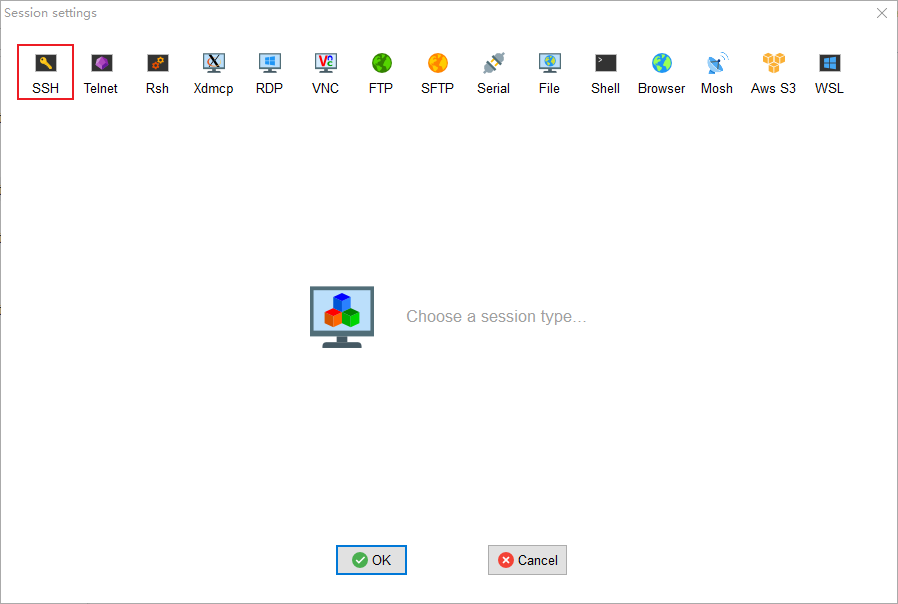](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/aDzimage.png) ##### 2.6 输入刚刚查询到的 IP 地址和刷入系统时或者自定义的用户名,完成后点击OK保存 [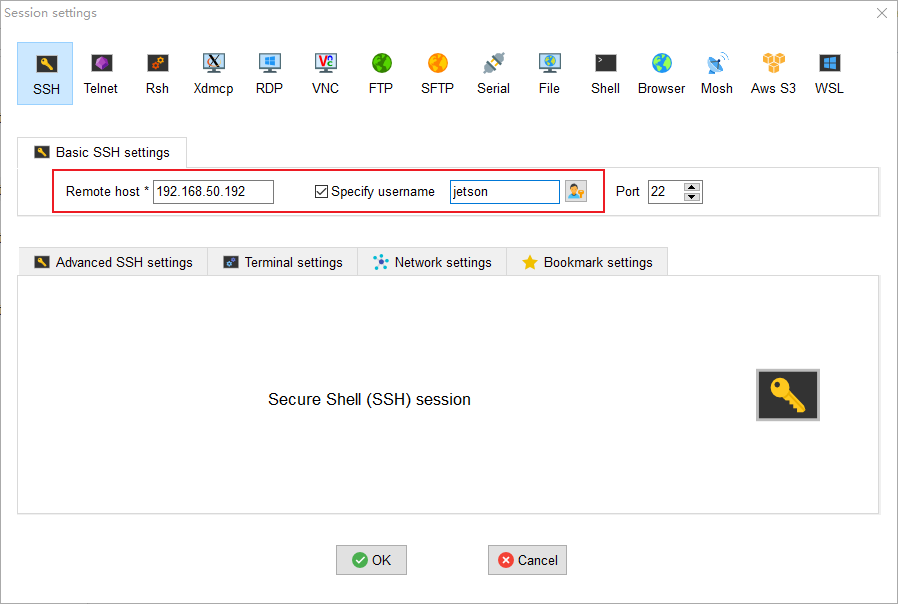](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/0S0image.png) ##### 2.7 输入密码(命令行不显示),完成后回车即可登录到系统。 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/ryXimage.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/L2iimage.png) #### 3. 通过type-c连接到SSH ##### 3.1 在开发板正常上电开机 在默认模式下连接到主机后,Jetson默认作为主机,其IP地址为 **192.168.55.1** [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/5Kbimage.png) ##### 3.2 使用 **putty** 或 **MobaXterm** 等连接工具,连接到开发板 参考 **2.3** 节进行操作 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/xOtimage.png) #### 4. 远程连接到Jetson桌面环境在无显示器模式下建议使用HDMI/DP诱骗器确保桌面环境正常
##### 4.1 使用 NoMachine **NoMachine** 是一款功能强大、跨平台的远程桌面软件,专注于提供高速、高画质的远程访问体验。其核心基于 **NX 协议**,通过高效压缩和加密技术实现低延迟传输,特别适合图形密集型任务(如视频编辑、3D 渲染)和多场景协作。 - 主机下载安装NoMachine [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/15-8-2025-94138-www-nomachine-com.jpeg) - Jetson端下载安装NoMachine (下载页面参考: [NoMachine–arm\_version](https://download.nomachine.com/download/?id=30&platform=linux&distro=arm)) [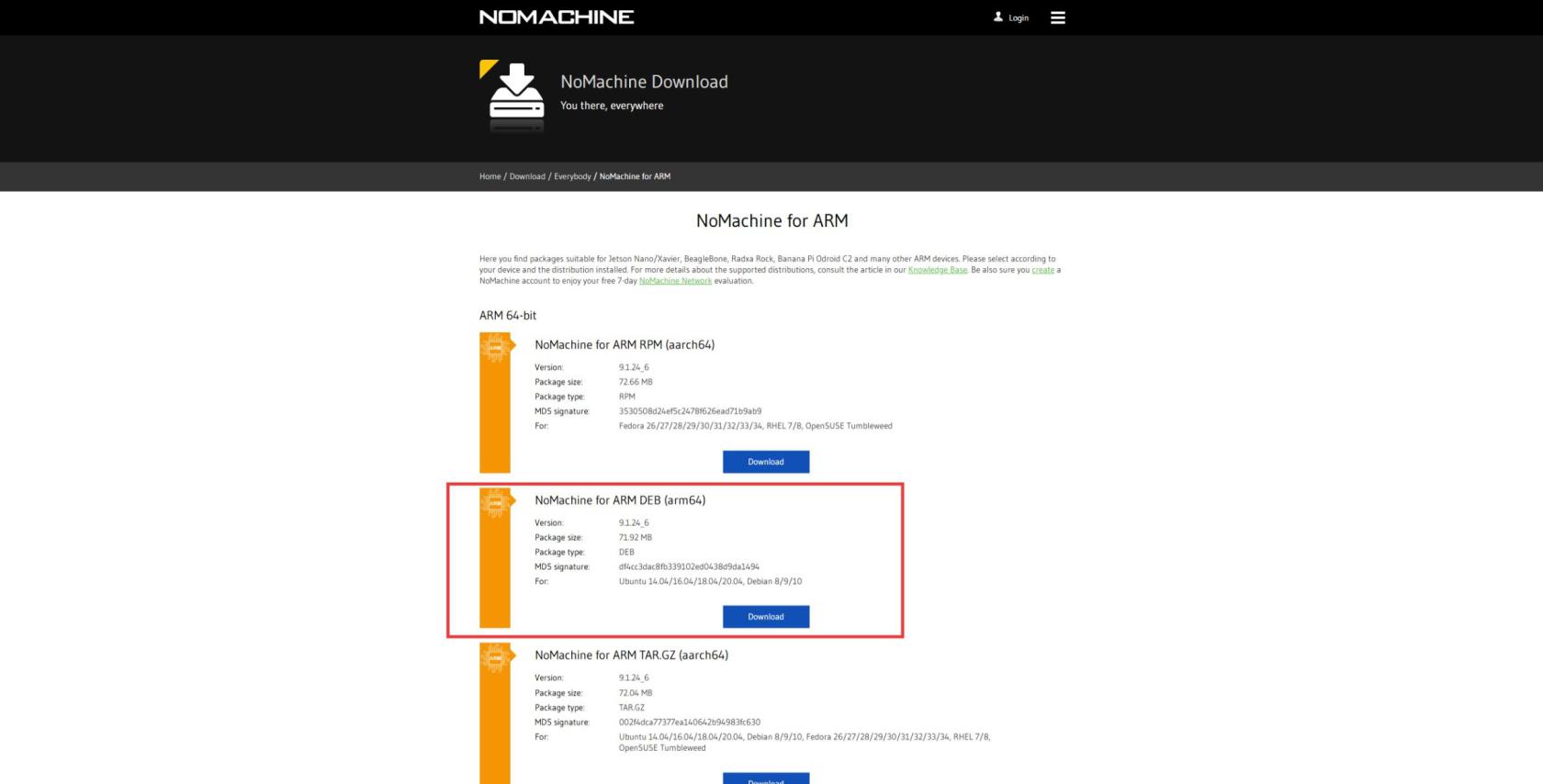](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/15-8-2025-95031-download-nomachine-com.jpeg) - 通过scp等方式上传到开发板(也可尝试复制下载链接通过命令行使用 wget 命令下载) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/VFBimage.png) - 命令行安装deb软件包 ```bash sudo dpkg -i nomachine_9.1.24_6_arm64.deb #随软件的更新包名可能发生变化 ``` - 主机和开发板都安装成功后将其连接到同一局域网下,在主机打开NoMachine便可自动搜索到Jetson服务端 [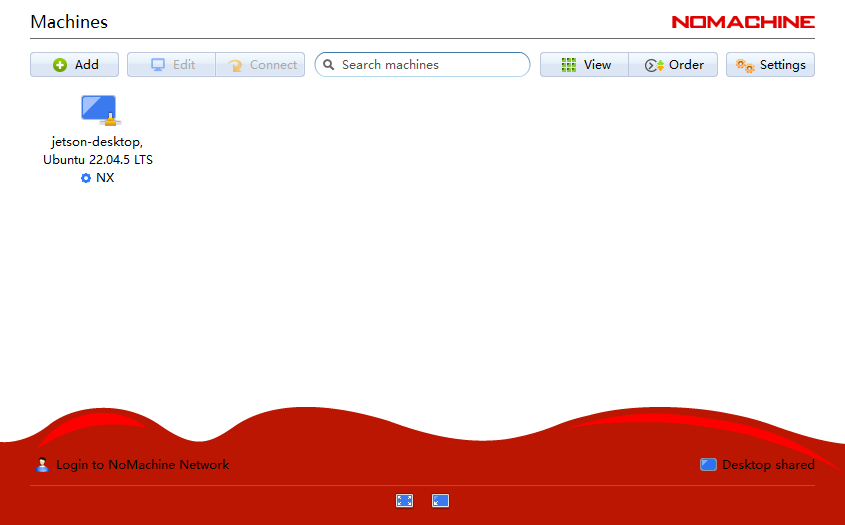](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/HD3image.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/9pQimage.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/4r1image.png) - 输入用户名和密码,点击OK [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/Anoimage.png) - 成功连接到桌面 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/A8Rimage.png) - 点击软件显示区域右上角可以进入设置调节画质、显示画幅和编码模式等选项 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/1LWimage.png) ##### 4.2 使用 VNC **VNC**(虚拟网络计算机)是一种基于图形界面的远程控制技术,允许用户通过网络(互联网或局域网)实时访问并操作另一台计算机的桌面环境。其核心协议为 **RFB(**Remote Framebuffer Protocol**)**,通过传输屏幕帧缓冲区的像素数据实现跨平台远程控制 - 下载安装主机端 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/cDeimage.png) - 在Jetson上进行如下设置 1. 设置VNC服务为开机自启 ``` cd /usr/lib/systemd/user/graphical-session.target.wants sudo ln -s ../vino-server.service ./. ``` 2. 配置VNC服务 ``` gsettings set org.gnome.Vino prompt-enabled false gsettings set org.gnome.Vino require-encryption false ``` 3. 设置VNC登录密码 ``` # 将 <密码> 替换为你要设置的密码 gsettings set org.gnome.Vino authentication-methods "['vnc']" gsettings set org.gnome.Vino vnc-password $(echo -n '密码'|base64) ``` 4. 重启系统生效 ``` sudo reboot ``` - 在主机的 **VNC** 软件中新建连接并输入 **Jetson** 的局域网 **IP** 并按回车确认 [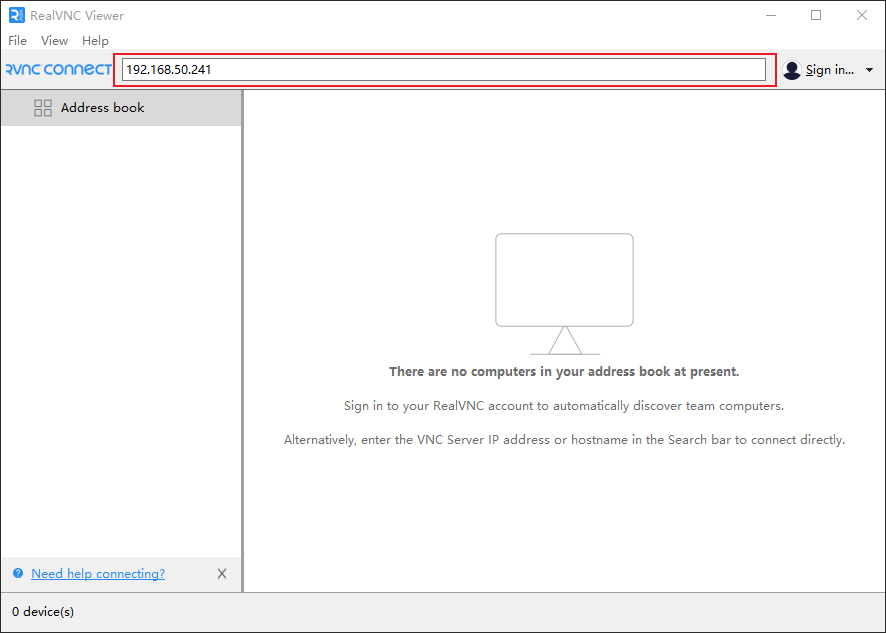](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/P73image.png) - 输入密码并确认 [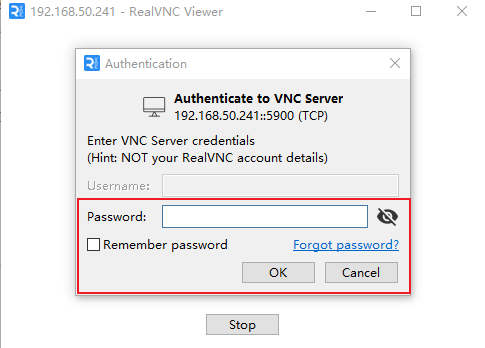](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/82Rimage.png) [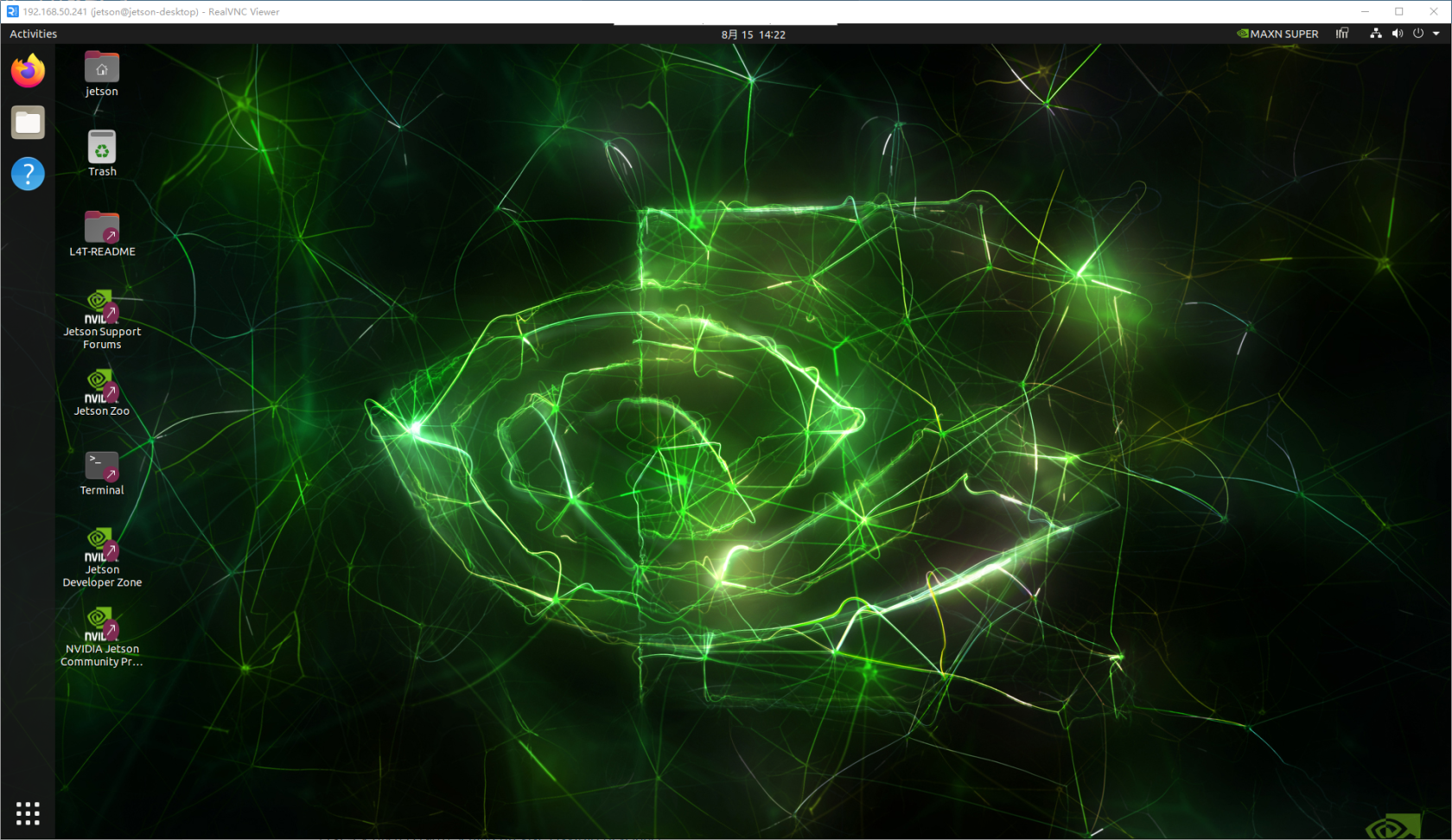](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/bjaimage.png) 可参考英伟达官方说明 [Setting Up VNC | NVIDIA Developer](https://developer.nvidia.com/embedded/learn/tutorials/vnc-setup) # JETSON ORIN NANO 进阶教程 本章主要Jetson特色的AI功能使用 # 安装jtop jtop 是英伟达专为 **Jetson 系列边缘计算设备**开发的**交互式系统监控工具。** ##### 1 安装jtop - 安装jtop需要的依赖库 ```bash sudo apt update sudo apt install python3 sudo apt install python3-pip ``` - 安装jtop ``` sudo pip3 install -U pip -i https://pypi.tuna.tsinghua.edu.cn/simple sudo pip3 install jetson-stats -i https://pypi.tuna.tsinghua.edu.cn/simple sudo systemctl restart jtop.service ``` ##### 2 jtop的使用 - 安装完成后在控制台中输入`jtop`打开主界面 [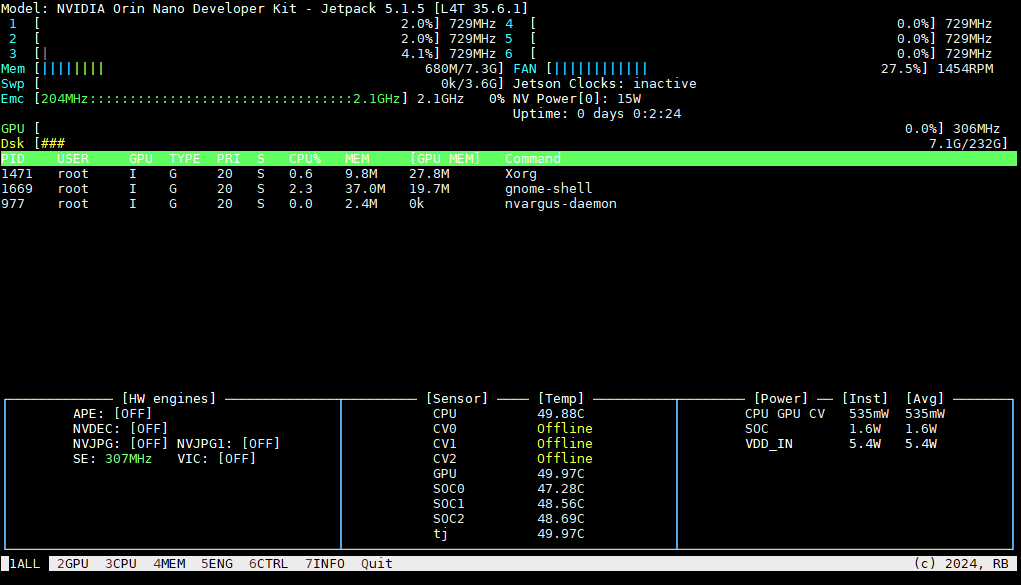](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/YiKimage.png) 2.1 监视各个模块的工作信息 2.2 控制风扇 [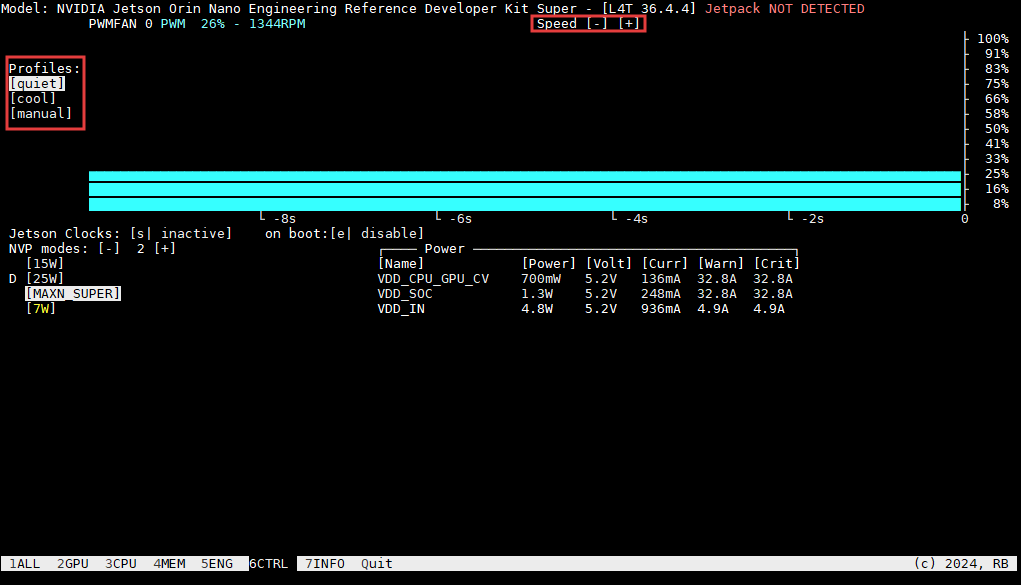](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/x711.png) 2.3 查看内置软件信息 [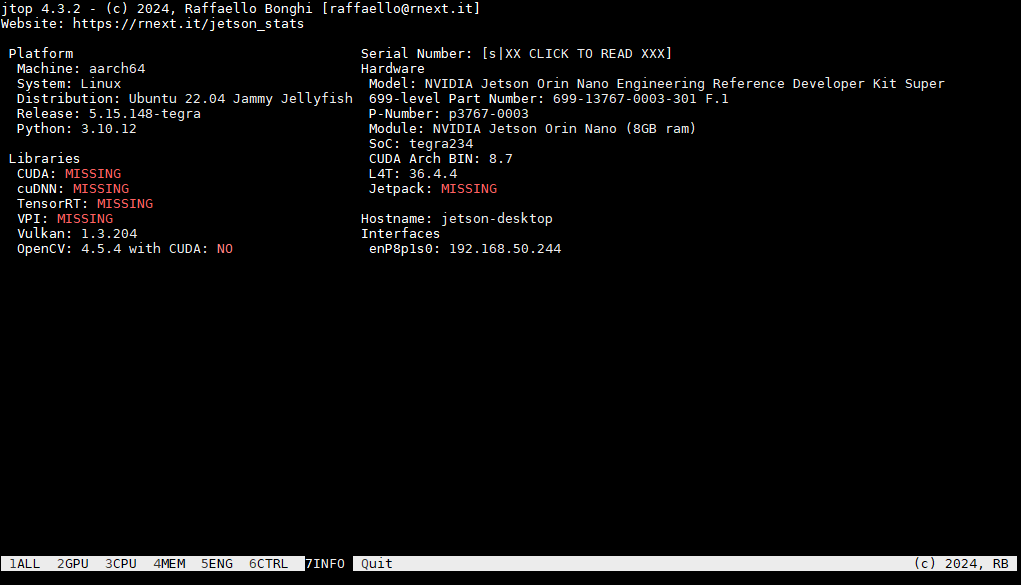](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/L3Timage.png) # 安装CUDA **Jetson** **CUDA**是NVIDIA为边缘AI设计的并行计算平台,基于ARM的Jetson系列硬件,支持**GPU加速**深度学习与**实时推理**,低**功耗高性能**。 ##### 安装CUDA JETSON SDK ``` sudo apt update sudo apt install nvidia-jetpack ``` [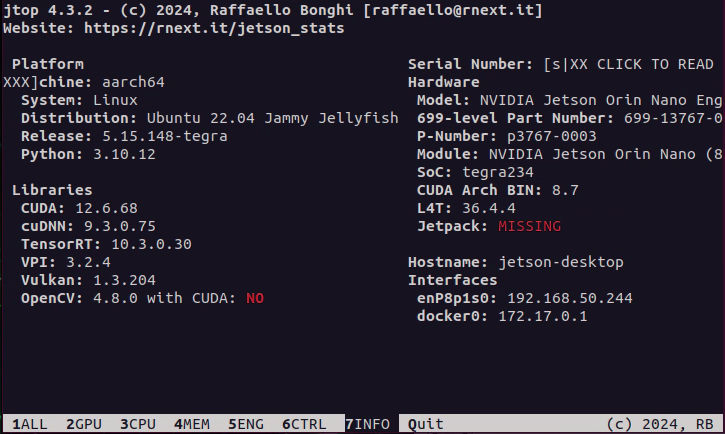](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/rUKimage.png) ##### 对开发板进行压力测试以下测试仅在 **JetPack** **6.1 (rev1)** 和 **JetPack 5.1.5** 版本中通过验证
调整功耗上限: ```bash sudo nvpmodel -m 2 #nano 模式2为super sudo jetson_clocks --fan ``` cpu压力测试: ```bash sudo apt install stress stress --cpu 8 --io 4 --vm 2 --vm-bytes 128M --hdd 1 --hdd-bytes 1024M ``` gpu压力测试: ```bash git clone https://github.com/anseeto/jetson-gpu-burn/ cd jetson-gpu-burn make ./gpu_burn 100000 ``` 状态查询: ```bash sudo jtop ``` [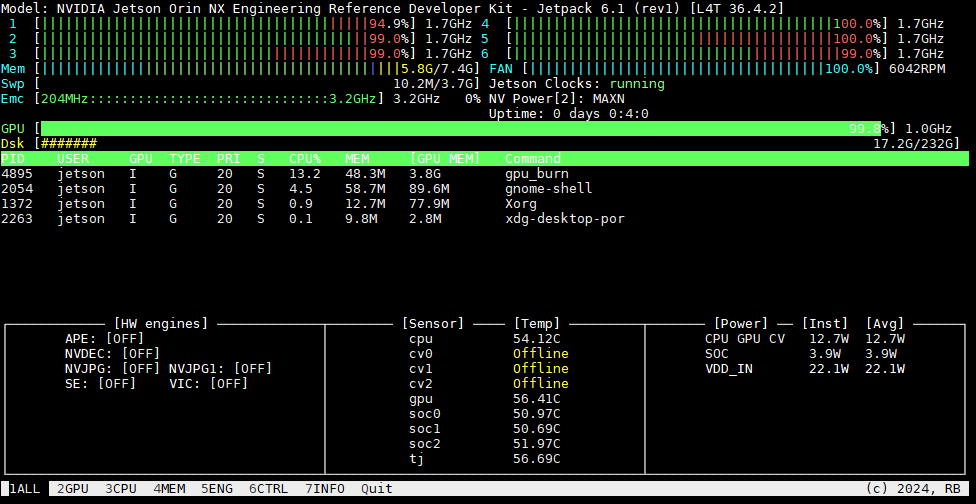](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/f1dimage.png) > Orin Nano 整机最大功率为**30W.** > > Orin NX 整机最大功率为**40W**. # 编译安装opencv with cudaJetPack预装的opencv没有启用cuda,需要自行编译安装。
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/g2Timage.png) #### 1. 脚本一键安装 ```bash #!/bin/bash # opencv_install.sh # Modified from https://github.com/AastaNV/JEP/blob/master/script/install_opencv4.10.0_Jetpack6.1.sh version="4.10.0" folder="workspace" remove_old="" set -e # Parse command-line arguments for arg in "$@"; do case $arg in --version=*) version="${arg#*=}" ;; --folder=*) folder="${arg#*=}" ;; --remove-old=*) remove_old="${arg#*=}" ;; --help|-h) echo "Usage: $0 [--version=4.x.x] [--folder=dir] [--remove-old=yes/no]" exit 0 ;; *) echo "Unknown parameter: $arg" echo "Usage: $0 [--version=4.x.x] [--folder=dir] [--remove-old=yes/no]" exit 1 ;; esac done # Create installation directory if it doesn't exist if [ ! -d "$folder" ]; then echo "Creating directory: $folder" mkdir -p "$folder" fi cd "$folder" || exit # Old OpenCV removal logic if [ -z "$remove_old" ]; then read -rp "Do you want to remove system-installed OpenCV? (yes/no): " remove_old fi case "$remove_old" in [yY] | [yY][eE][sS]) echo "** Removing system OpenCV packages" sudo apt -y purge *libopencv* sudo apt -y autoremove ;; *) echo "** Skipping system OpenCV removal" ;; esac echo "------------------------------------" echo "** Installing dependencies (1/4)" echo "------------------------------------" sudo apt-get update sudo apt-get install -y build-essential cmake git libgtk2.0-dev pkg-config \ libavcodec-dev libavformat-dev libswscale-dev libgstreamer1.0-dev \ libgstreamer-plugins-base1.0-dev python3-dev python3-numpy libtbb2 \ libtbb-dev libjpeg-dev libpng-dev libtiff-dev libv4l-dev v4l-utils qv4l2 curl # Verify essential dependencies installed for dep in g++ cmake git pkg-config; do if ! command -v "$dep" > /dev/null; then echo "Error: $dep installation failed" exit 1 fi done echo "------------------------------------" echo "** Downloading OpenCV ${version} (2/4)" echo "------------------------------------" # Check if source files already exist download_opencv=false download_contrib=false if [ ! -f "opencv-${version}.zip" ]; then echo "Downloading opencv-${version}.zip" wget -O opencv-${version}.zip https://github.com/opencv/opencv/archive/${version}.zip || { echo "Download failed! Check your internet connection or verify the version exists" exit 1 } download_opencv=true else echo "opencv-${version}.zip exists, skipping download" fi if [ ! -f "opencv_contrib-${version}.zip" ]; then echo "Downloading opencv_contrib-${version}.zip" wget -O opencv_contrib-${version}.zip https://github.com/opencv/opencv_contrib/archive/${version}.zip || { echo "Download failed! Check your internet connection or verify the version exists" exit 1 } download_contrib=true else echo "opencv_contrib-${version}.zip exists, skipping download" fi # Unpack source files if [ ! -d "opencv-${version}" ] || $download_opencv; then if [ -d "opencv-${version}" ]; then echo "Removing existing opencv-${version} directory" rm -rf "opencv-${version}" fi echo "Unpacking opencv-${version}.zip" unzip -q opencv-${version}.zip || { echo "Extraction failed! File may be corrupt" exit 1 } fi if [ ! -d "opencv_contrib-${version}" ] || $download_contrib; then if [ -d "opencv_contrib-${version}" ]; then echo "Removing existing opencv_contrib-${version} directory" rm -rf "opencv_contrib-${version}" fi echo "Unpacking opencv_contrib-${version}.zip" unzip -q opencv_contrib-${version}.zip || { echo "Extraction failed! File may be corrupt" exit 1 } fi # Clean up zip files after successful extraction if [ $? -eq 0 ]; then rm -f opencv-${version}.zip opencv_contrib-${version}.zip fi cd opencv-${version} || exit echo "------------------------------------" echo "** Building OpenCV ${version} (3/4)" echo "------------------------------------" mkdir -p release cd release # Auto-detect CUDA architecture cuda_arch="" if command -v nvidia-smi &> /dev/null; then gpu_name=$(nvidia-smi --query-gpu=name --format=csv,noheader | head -n1) if [[ $gpu_name == *"Orin"* ]] || [[ $gpu_name == *"Jetson"* ]]; then cuda_arch="8.7" elif [[ $gpu_name == *"A100"* ]]; then cuda_arch="8.0" fi fi cmake_cmd="cmake -D WITH_CUDA=ON -D WITH_CUDNN=ON -D OPENCV_GENERATE_PKGCONFIG=ON " cmake_cmd+="-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-${version}/modules " cmake_cmd+="-D WITH_GSTREAMER=ON -D WITH_LIBV4L=ON -D BUILD_opencv_python3=ON " cmake_cmd+="-D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_EXAMPLES=OFF " cmake_cmd+="-D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local " # Add CUDA architecture if detected if [ -n "$cuda_arch" ]; then echo "Detected NVIDIA GPU: ${gpu_name}, using CUDA_ARCH_BIN=${cuda_arch}" cmake_cmd+="-D CUDA_ARCH_BIN=${cuda_arch} -D CUDA_ARCH_PTX=\"\" " else echo "No supported GPU detected, skipping CUDA architecture flags" fi # Execute CMake configuration echo "CMake command: $cmake_cmd .." $cmake_cmd .. || { echo "CMake configuration failed" exit 1 } # Parallel build (leave one core for system stability) cpu_cores=$(($(nproc) - 1)) [ $cpu_cores -lt 1 ] && cpu_cores=1 echo "Building with ${cpu_cores} CPU cores" make -j${cpu_cores} || { echo "Compilation failed" exit 1 } echo "------------------------------------" echo "** Installing OpenCV ${version} (4/4)" echo "------------------------------------" sudo make install || { echo "Installation failed" exit 1 } # Add environment variables to .bashrc (only if not already present) bashrc=~/.bashrc env_lines=( "export LD_LIBRARY_PATH=/usr/local/lib:\$LD_LIBRARY_PATH" "export PYTHONPATH=/usr/local/lib/python3.10/site-packages/:\$PYTHONPATH" ) for line in "${env_lines[@]}"; do if ! grep -Fxq "$line" "$bashrc"; then echo "Adding to .bashrc: $line" echo "$line" >> "$bashrc" else echo "Environment variable already exists: $line" fi done source ~/.bashrc echo "** OpenCV ${version} installation completed" echo "Verification commands:" echo " pkg-config --modversion opencv4" echo " python3 -c 'import cv2; print(cv2.__version__)'" echo "** Installation successful!" ``` #### 2. 手动安装 2.1 卸载自带opencv ```bash sudo apt-get purge libopencv* sudo apt autoremove sudo apt-get update ``` 2.2 安装前置软件包 ```bash sudo apt-get update sudo apt-get install -y build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo apt-get install -y libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python3.10-dev python3-numpy sudo apt-get install -y libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libv4l-dev v4l-utils qv4l2 sudo apt-get install -y curl ``` 2.3 获取opencv源码(以4.10.0版本为例) ```bash version=4.10.0 wget -O "opencv-${version}.zip" "https://github.com/opencv/opencv/archive/${version}.zip" wget -O "opencv_contrib-${version}.zip" "https://github.com/opencv/opencv_contrib/archive/${version}.zip" unzip "opencv-${version}.zip" unzip "opencv_contrib-${version}.zip" rm "opencv-${version}.zip" "opencv_contrib-${version}.zip" cd "opencv-${version}/" ``` 2.4 编译源码此步骤至少需要半小时以上。
中途可能会下载第三方软件包,建议提前确认网络环境。
```bash mkdir build cd build/ cmake -D WITH_CUDA=ON -D WITH_CUDNN=ON -D CUDA_ARCH_BIN="8.7" -D CUDA_ARCH_PTX="" -D OPENCV_GENERATE_PKGCONFIG=ON -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-${version}/modules -D WITH_GSTREAMER=ON -D WITH_LIBV4L=ON -D BUILD_opencv_python3=ON -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_EXAMPLES=OFF -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local .. make -j$(nproc) ``` 2.5 安装 ```bash sudo make install echo 'export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH' >> ~/.bashrc echo 'export PYTHONPATH=/usr/local/lib/python3.10/site-packages/:$PYTHONPATH' >> ~/.bashrc source ~/.bashrc ``` #### 三、验证测试 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/bA0image.png) ```c++ #--test_cuda.cpp #include| PyTorch Version | NVIDIA Framework [Container](https://catalog.ngc.nvidia.com/orgs/nvidia/containers/pytorch) | NVIDIA Framework [Wheel](https://developer.download.nvidia.com/compute/redist/jp/) | JetPack Version |
|---|---|---|---|
| [2.8.0a0+5228986c39](https://github.com/pytorch/pytorch/commit/5228986c395dc79f90d2a2b991deea1eef188260) | 25.06 | - | 6.2 |
| [2.8.0a0+5228986c39](https://github.com/pytorch/pytorch/commit/5228986c395dc79f90d2a2b991deea1eef188260) | 25.05 | - | 6.2 |
| [2.7.0a0+79aa17489c](https://github.com/pytorch/pytorch/commit/79aa17489c3fc5ed6d5e972e9ffddf73e6dd0a5c) | 25.04 | - | 6.2 |
| [2.7.0a0+7c8ec84dab](https://github.com/pytorch/pytorch/commit/7c8ec84dab7dc10d4ef90afc93a49b97bbd04503) | 25.03 | - | 6.2 |
| [2.7.0a0+6c54963f75](https://github.com/pytorch/pytorch/commit/6c54963f75e9dfdae34c44f71081b5d3972b6b8d) | 25.02 | - | 6.2 |
| [2.6.0a0+ecf3bae40a](https://github.com/pytorch/pytorch/commit/ecf3bae40a6f2f0f3b237bde1fc4b2492765ab13) | 25.01 | - | 6.1 |
| [2.6.0a0+df5bbc09d1](https://github.com/pytorch/pytorch/commit/df5bbc09d191fff3bdb592c184176e84669a7157) | 24.12 | - | 6.1 |
| [2.6.0a0+df5bbc0](https://github.com/pytorch/pytorch/commit/df5bbc09d191fff3bdb592c184176e84669a7157) | 24.11 | - | 6.1 |
| [2.5.0a0+e000cf0ad9](https://github.com/pytorch/pytorch/commit/e000cf0ad980e5d140dc895a646174e9b945cf26) | 24.10 | - | 6.1 |
| [2.5.0a0+b465a5843b](https://github.com/pytorch/pytorch/commit/b465a5843b92f33fe3e89ff7ee91c6833df6aec0) | 24.09 | 24.09 | 6.1 |
| [2.5.0a0+872d972e41](https://github.com/pytorch/pytorch/commit/872d972e41596a9ac94dfd343f40bfc12b340a74) | 24.08 | - | 6.0 |
| [2.4.0a0+3bcc3cddb5](https://github.com/pytorch/pytorch/commit/3bcc3cddb580bf0f0f1958cfe27001f236eac2c1) | 24.07 | 24.07 | 6.0 |
| [2.4.0a0+f70bd71a48](https://github.com/pytorch/pytorch/commit/f70bd71a48) | 24.06 | 24.06 | 6.0 |
| [2.4.0a0+07cecf4168](https://github.com/pytorch/pytorch/commit/07cecf4168503a5b3defef9b2ecaeb3e075f4761) | 24.05 | 24.05 | 6.0 |
| [2.3.0a0+6ddf5cf85e](https://github.com/pytorch/pytorch/commit/6ddf5cf85e3c27c596175aba7bf5affb5426255f) | 24.04 | 24.04 | 6.0 Developer Preview |
| [2.3.0a0+40ec155e58](https://github.com/pytorch/pytorch/commit/40ec155e58ee1a1921377ff921b55e61502e4fb3) | 24.03 | [24.03](https://developer.download.nvidia.com/compute/redist/jp/v60dp/pytorch/torch-2.3.0a0+40ec155e58.nv24.03.13384722-cp310-cp310-linux_aarch64.whl) | |
| [2.3.0a0+ebedce2](https://github.com/pytorch/pytorch/commit/ebedce24ab578036dd9257e4928eea9ee38d1192) | 24.02 | 24.02 | |
| [2.2.0a0+81ea7a4](https://github.com/pytorch/pytorch/commit/81ea7a48) | 23.12, 24.01 | 23.12, 24.01 | |
| [2.2.0a0+6a974bec](https://github.com/pytorch/pytorch/commit/6a974bec) | 23.11 | 23.11 | |
| [2.1.0a](https://github.com/pytorch/pytorch/commit/41361538a978eb03fa1e88bf5b8e4410db7a6927) | 23.06 | 5.1.x | |
| [2.0.0](https://github.com/pytorch/pytorch/tree/v2.0.0) | 23.05 | ||
| [2.0.0a0+fe05266f](https://github.com/pytorch/pytorch/commit/fe05266fda4f908130dea7cbac37e9264c0429a2) | 23.04 | ||
| [2.0.0a0+8aa34602](https://github.com/pytorch/pytorch/commit/8aa34602f703896c16ae57f622ff4cb1c86c04dd) | 23.03 | ||
| [1.14.0a0+44dac51c](https://github.com/pytorch/pytorch/commit/44dac51c36d01f63e64585e5e7a864cb8e37948a) | 23.02, 23.01 | ||
| [1.13.0a0+936e930](https://github.com/pytorch/pytorch/commit/936e930) | 22.11 | 5.0.2 | |
| [1.13.0a0+d0d6b1f](https://github.com/pytorch/pytorch/commit/d0d6b1f) | 22.09, 22,10 | ||
| [1.13.0a0+08820cb](https://github.com/pytorch/pytorch/commit/08820cb) | 22.07 | 22.07 | |
| [1.13.0a0+340c412](https://github.com/pytorch/pytorch/commit/340c412) | 22.06 | 22.06 | 5.0.1 |
| [1.12.0a0+8a1a93a9](https://github.com/pytorch/pytorch/commit/8a1a93a9) | 22.05 | 22.05 | 5.0 |
| [1.12.0a0+bd13bc66](https://github.com/pytorch/pytorch/commit/bd13bc66) | 22.04 | ||
| [1.12.0a0+2c916ef](https://github.com/pytorch/pytorch/commit/2c916ef) | 22.03 | ||
| [1.11.0a0+bfe5ad28](https://github.com/pytorch/pytorch/commit/bfe5ad28) | 22.01 | 4.6.1 |
开始本节内容前请确定您的网络环境能正常拉取docker镜像
Jetson-container是NVIDIA为Jetson设备打造的轻量Docker环境,预装CUDA、cuDNN、TensorRT,快速部署AI边缘应用。 本节以 **Jetson Orin NX 16GB**,**JetPack6.2.1** 运行 **Comfy-UI** 为例进行展示。您也可以参考[官方示例](https://github.com/dusty-nv/jetson-containers/tree/master/packages/diffusion/comfyui) **Comfy-UI** 是一款专业的节点式Stable Diffusion图形界面,拖拽连接即可构建文生图工作流,支持LoRA、ControlNet、视频扩散,低代码、易扩展等应用及特性。 [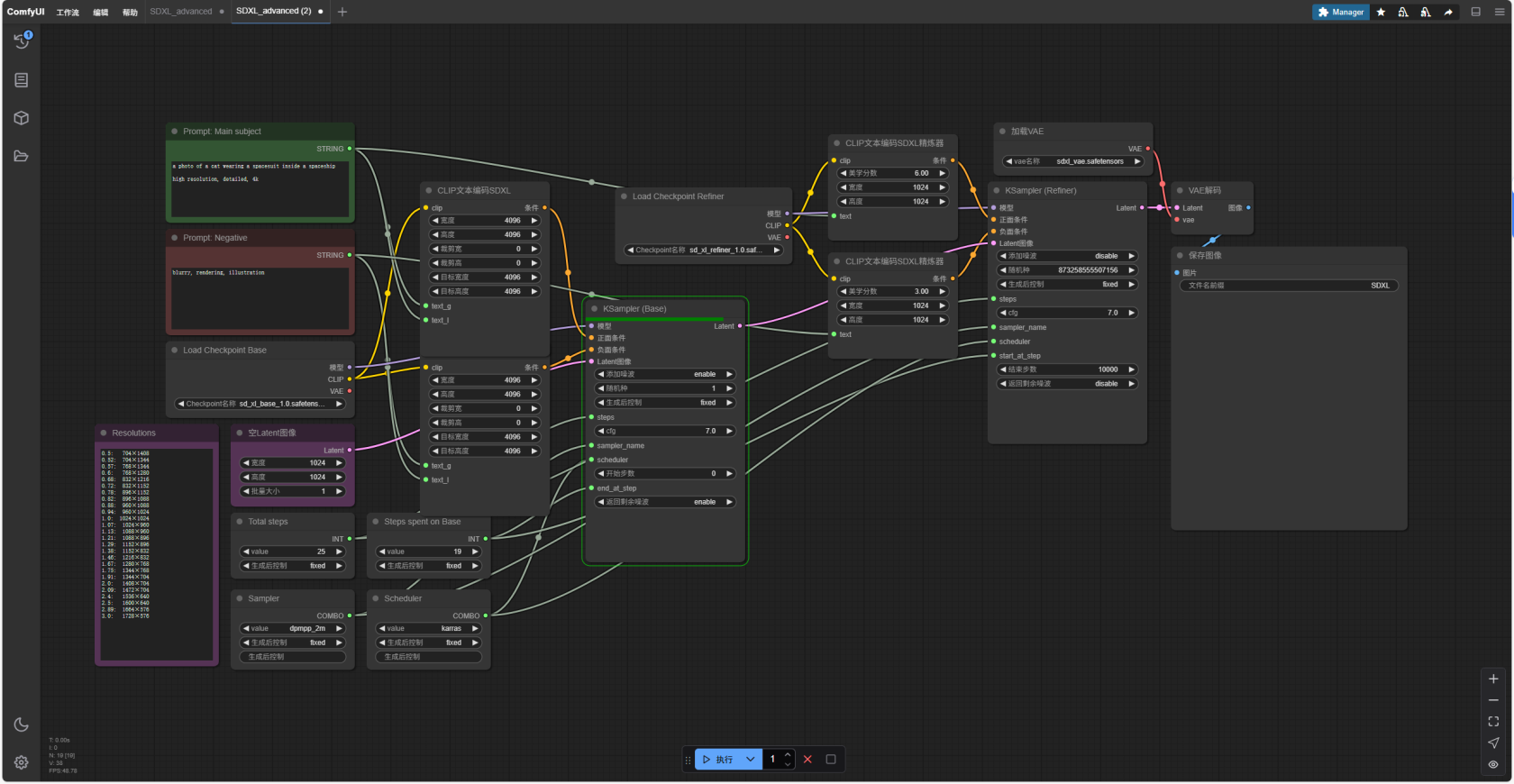](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/1uQimage.png) 1\. 下载编译[jetson-container](https://github.com/dusty-nv/jetson-containers/tree/master)环境 ``` git clone https://github.com/dusty-nv/jetson-containers.git cd jetson-containersbash jetson-containers/install.sh ``` 2\. 拉取docker镜像并运行 ``` jetson-containers run dustynv/comfyui:r36.4.3 ``` 3\. 成功运行后命令行窗口输出如下 [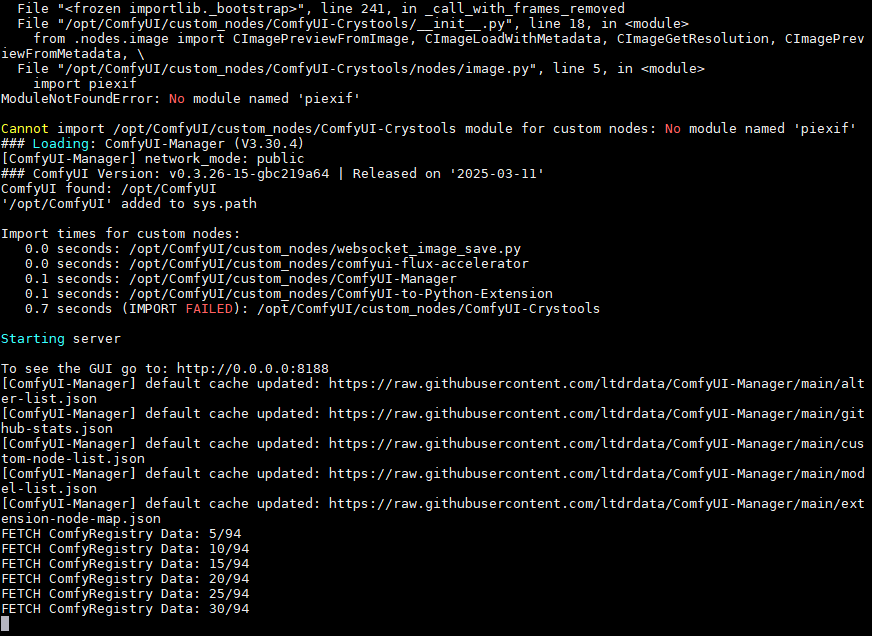](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/wDnimage.png) 4\. 打开对应服务的GUI网页 若在Jetson设备上打开则访问 [http://0.0.0.0:8188](http://0.0.0.0:8188) 若在局域网内的其他设备则输入 http://<jetson设备IP>:8188 [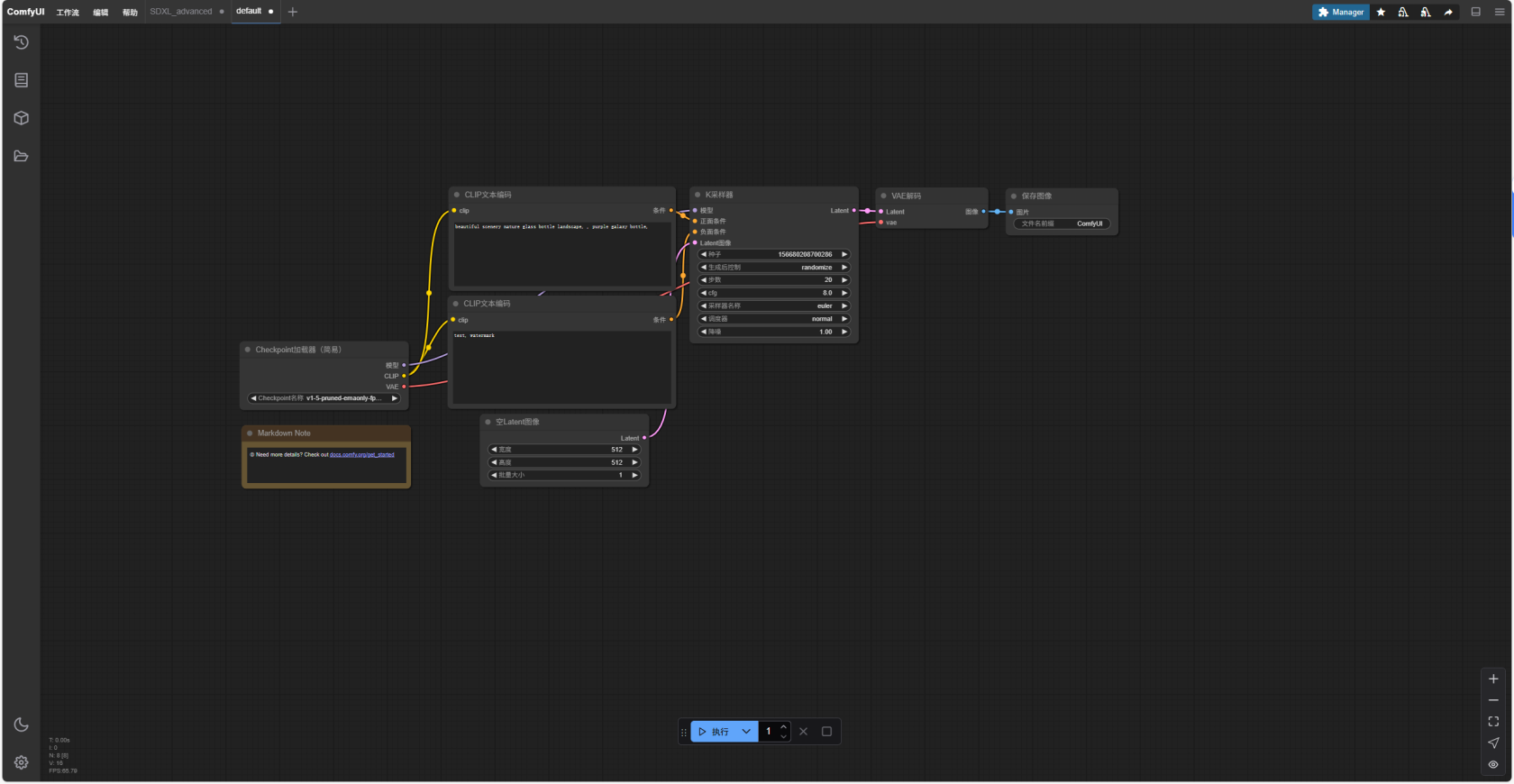](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/52qimage.png) 5\. 设定映射路径,将开发板里下载好的模型映射到容器内部目录 ```bash jetson-containers run ~/models/:/opt/ComfyUI/models/checkpoints dustynv/comfyui:r36.4.3 ``` 6\. 按照需求搭建工作流并调整参数生成图像 [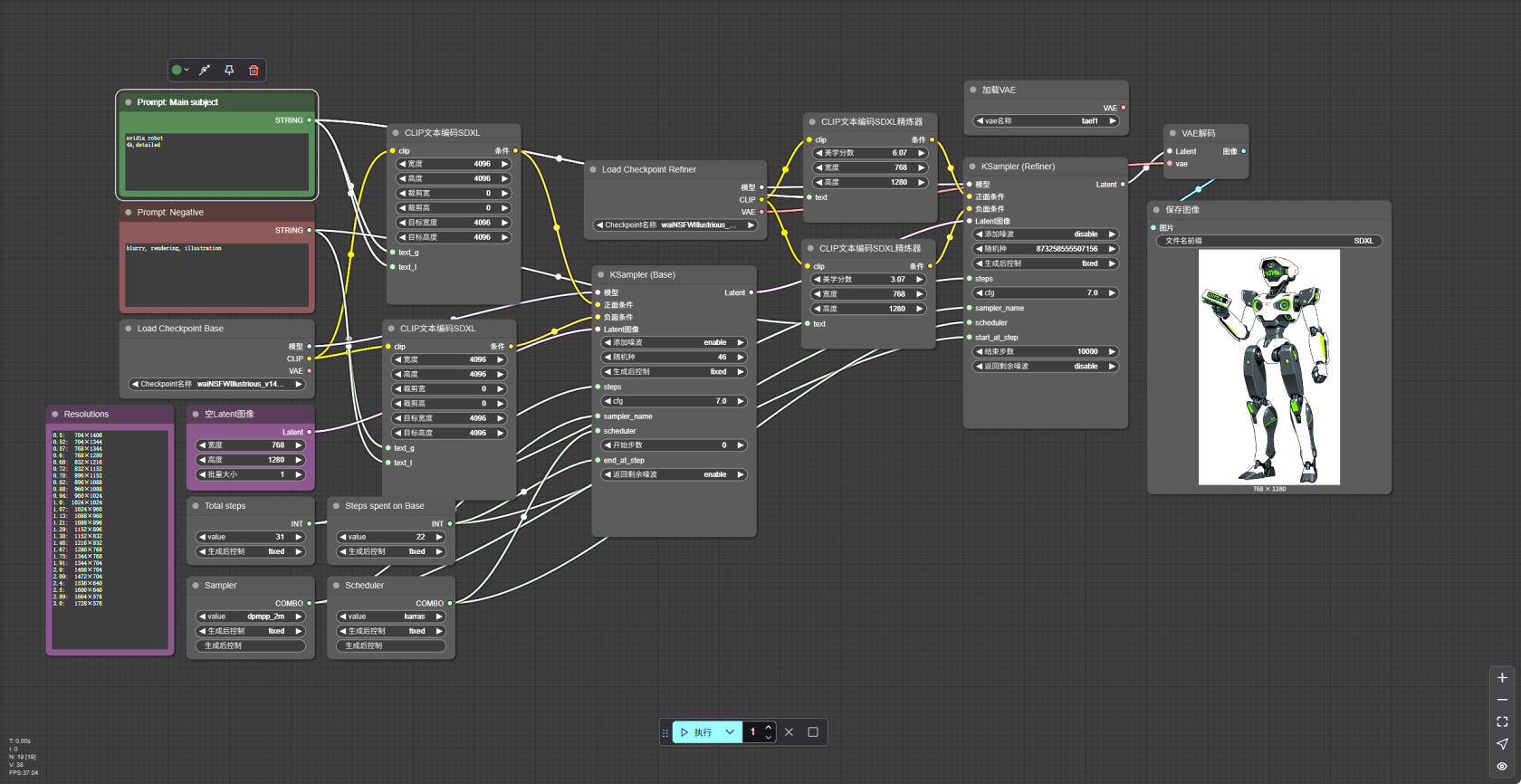](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/1Naimage.png) 关于ComfyUI的使用教程请参考其官网 [ComfyUI | 用AI生成视频、图像、音频](https://www.comfy.org/zh-cn/) # 网卡驱动 在 **JetPack6** 以后官方移除了自带的 **Intel 8625NGW** 驱动,同时为了能够使用性能更优的 **Intel AX200** 和 **AX210** 网卡我们需要自行手动安装 **Intel** 网卡驱动包。 1\. 插入网卡,通电开机,并查看网卡状态 ```bash sudo lshw -C network ``` 若显示product: Wi-Fi 6 AX200,则硬件已经检测到,若看到`UNCLAIMED`字样则表明驱动未安装 2\. 安装 **iwlwifi** 驱动 iwlwifi 是英特尔(Intel)为其无线网卡开发的开源驱动程序,专为 Linux 操作系统设计,用于支持英特尔全系列无线网络适配器(如 Centrino、Wi-Fi 6/6E/7 等芯片)在 Linux 环境下的高效运行。 ```bash sudo apt update sudo apt install backport-iwlwifi-dkms ``` 3\. 重启开发板 ```bash sudo reboot ``` 4\. 再次查看网卡状态 ```bash jetson@jetson-desktop:~$ sudo lshw -C network [sudo] password for jetson: *-network description: Wireless interface product: Wi-Fi 6 AX200 vendor: Intel Corporation physical id: 0 bus info: pci@0001:01:00.0 logical name: wlan0 version: 1a serial: ac:12:03:a0:4c:db width: 64 bits clock: 33MHz capabilities: pm msi pciexpress msix bus_master cap_list ethernet physical wireless configuration: broadcast=yes driver=iwlwifi driverversion=5.10.216-tegra firmware=59.601f3a66.0 cc-a0-59.ucode latency=0 link=no multicast=yes wireless=IEEE 802.11 resources: irq:55 memory:20a8000000-20a8003fff *-network ``` `description` 字段显示为 `Wireless interface` /`Ethernet interface` 便可正常使用无线网卡 # 4G模块使用说明 移远通信LTE Standard EM05系列是一款专为IoT/M2M应用而设计的LTE Cat 4模块。采用节省空间的M.2(NGFF)封装类型,超薄、紧凑的设计使其更易于嵌入到小尺寸产品中。 EM05系列支持最大下行速率150 Mbps,最大上行速率50 Mbps,包含三个型号:EM05-CN、EM05-E和EM05-G。支持LTE-FDD、LTE-TDD、DC-HSDPA、HSPA+、HSDPA、HSUPA、WCDMA和CDMA等多种网络制式。 要在Jetson系列上使用EM-05模块需要重新编译系统内核并刷入新编译的系统。 #### 方法一:替换新内核 ##### 1.1 拉取编译好的资料 ##### 1.2 修改设备树配置文件 ##### 1.3 移动内核和驱动到指定位置 ##### 1.4 应用更改并重启验证 #### 方法二:编译刷入完整系统 ##### 2.1 获取源码和工具链 - 安装编译依赖工具 ```bash sudo apt install build-essential bc git bison flex libssl-dev zip libncurses-dev make git ``` - 创建工具链放置目录 ``` mkdir $HOME/l4t-gcc-toolchain cd $HOME/l4t-gcc-toolchain ``` - 下载并解压交叉编译工具链 ``` wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v3.0/toolchain/aarch64--glibc--stable-2022.08-1.tar.bz2 tar xf aarch64--glibc--stable-2022.08-1.tar.bz2 ``` - 进入到缓存好的刷机固件目录 ```bash cd $HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/source #根据实际目录进行修改 ``` - 根据 release tag 拉取源码。[Jetson Linux Archive | NVIDIA Developer](https://developer.nvidia.com/embedded/jetson-linux-archive) ```bash ./source_sync.sh -k -t本部分内容可参考[移远Linux&Andriod驱动技术手册](https://forums.quectel.com/uploads/short-url/95mRmCPDAFQTH1TzCIB2cuFr9Yo.pdf "移远Linux&Andriod驱动技术手册")
Jetson Orin Nano配置文件路径:arch/arm64/configs/defconfig - 配置USB转串口驱动添加如下内容 ```bash CONFIG_USB_SERIAL=y CONFIG_USB_SERIAL_WWAN=y CONFIG_USB_SERIAL_OPTION=y CONFIG_USB_NET_DRIVERS=y CONFIG_USB_USBNET=y CONFIG_USB_NET_QMI_WWAN=y CONFIG_USB_WDM=y ``` - 修改 drivers/usb/serial/option.c,向USB转串口驱动添加VID和PID ```c static const struct usb_device_id option_ids[] = { #if 1 // 2025-04-24 Added by Quectel { USB_DEVICE(0x2C7C, 0x0125) }, #endif ... ... } ``` - 使用USBNet驱动,文件路径:drivers/usb/serial/option.c ```c static int option_probe(struct usb_serial *serial, const struct usb_device_id *id) { ... ... #if 1 // 2025-04-24 Added by Quectel if (serial->dev->descriptor.idVendor == cpu_to_le16(0x2C7C)) { __u16 idProduct = le16_to_cpu(serial->dev->descriptor.idProduct); struct usb_interface_descriptor *intf = &serial->interface->cur_altsetting->desc; if (intf->bInterfaceClass != 0xFF || intf->bInterfaceSubClass == 0x42) { //ECM, RNDIS, NCM, MBIM, ACM, UAC, ADB return -ENODEV; } if ((idProduct&0xF000) == 0x0000) { //MDM interface 4 is QMI if (intf->bInterfaceNumber == 4 && intf->bNumEndpoints == 3 && intf->bInterfaceSubClass == 0xFF && intf->bInterfaceProtocol == 0xFF) return -ENODEV; } } #endif /* Store the device flags so we can use them during attach. */ usb_set_serial_data(serial, (void *)device_flags); return 0; } ``` - 添加零包机制,文件路径:drivers/usb/serial/usb\_wwan.c ```c static struct urb *usb_wwan_setup_urb(struct usb_serial_port *port, int endpoint, int dir, void *ctx, char *buf, int len, void (*callback) (struct urb *)) { ... ... usb_fill_bulk_urb(urb, serial->dev, usb_sndbulkpipe(serial->dev, endpoint) | dir, buf, len, callback, ctx); #if 1 //2025-04-24 Added by Quectel for zero packet if (dir == USB_DIR_OUT) { struct usb_device_descriptor *desc = &serial->dev->descriptor; if (desc->idVendor == cpu_to_le16(0x2C7C)) urb->transfer_flags |= URB_ZERO_PACKET; } #endif return urb; } ``` - 添加Reset-resume机制(休眠唤醒)文件路径:drivers/usb/serial/option.c ```c static struct usb_serial_driver option_1port_device = { ... ... #ifdef CONFIG_PM .suspend = usb_wwan_suspend, .resume = usb_wwan_resume, #if 1 //2025-04-24 Added by Quectel .reset_resume = usb_wwan_resume, #endif #endif }; ``` - 添加QMI\_WWAN驱动 移远提供了QMI\_WWAN驱动源文件qmi\_wwan\_q.c,将其复制到 drivers/net/usb/ 目录下。同时修改drivers/net/usb/Makefile,使其能编译 qmi\_wwan\_q.c ```bash #Makefile # must insert qmi_wwan_q.o before qmi_wwan.o obj-${CONFIG_USB_NET_QMI_WWAN} += qmi_wwan_q.o obj-${CONFIG_USB_NET_QMI_WWAN} += qmi_wwan.o ``` ##### 2.3 编译内核此步骤可能需要进行半个小时以上
- 创建输出目录 ```bash cd ../../ mkdir kernel_out ``` - 编译安装内核 ```bash export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- #设置交叉编译工具 make -C kernel #构建 Jetson Linux 内核镜像 sudo -E make install -C kernel #安装内核模块和树内模块 ``` - 将内核镜像复制到刷机目录下 ``` cp kernel/kernel-jammy-src/arch/arm64/boot/Image ../Linux_for_Tegra/kernel/Image ``` - 构建NVIDIA树外模块(驱动程序) ```bash export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src make modules ``` - 安装到刷机目录下 ```bash export INSTALL_MOD_PATH=$HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/rootfs/ #根据实际目录进行修改 sudo -E make modules_install ``` - 开始构建DTB ```bash export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src make dtbs ``` - 将生成的dtb文件拷贝到刷机目录 ```bash cp kernel-devicetree/generic-dts/dtbs/* ../kernel/dtb/ ``` ##### 2.4 刷入系统 - 进入刷机固件缓存目录 ```bash cd $HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/source #根据实际目录进行修改 ``` 使用命令行刷机: - super模式 ```bash sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit-super internal ``` - 普通模式 ``` sudo ./flash.sh jetson-orin-nano-devkit-nvme internal ``` ##### 2.5 开机验证 - 将Quectel\_Qconnectmanager上传到开发板 - 解压并编译 ```bash unizp Quectel_QConnectManager_Linux_V1.6.5.zip cd Quectel_QConnectManager_Linux_V1.6.5 make ``` 成功运行便可4G拨号上网 ``` jetson@jetson-desktop:~/Downloads/Quectel_QConnectManager_Linux_V1.6.5$ sudo ./quectel-CM [08-08_11:39:04:415] QConnectManager_Linux_V1.6.5 [08-08_11:39:04:416] Find /sys/bus/usb/devices/1-2.2 idVendor=0x2c7c idProduct=0x125, bus=0x001, dev=0x007 [08-08_11:39:04:416] Auto find qmichannel = /dev/cdc-wdm0 [08-08_11:39:04:417] Auto find usbnet_adapter = wwan0 [08-08_11:39:04:417] netcard driver = qmi_wwan_q, driver version = V1.2.6 [08-08_11:39:04:417] Modem works in QMI mode [08-08_11:39:04:447] cdc_wdm_fd = 7 [08-08_11:39:04:523] Get clientWDS = 5 [08-08_11:39:04:557] Get clientDMS = 1 [08-08_11:39:04:589] Get clientNAS = 2 [08-08_11:39:04:620] Get clientUIM = 1 [08-08_11:39:04:653] Get clientWDA = 1 [08-08_11:39:04:684] requestBaseBandVersion EM05CNFDR08A03M1G_ND [08-08_11:39:04:812] requestGetSIMStatus SIMStatus: SIM_READY [08-08_11:39:04:876] requestGetProfile[pdp:1 index:1] ctnet///0/IPV4V6 [08-08_11:39:04:908] requestRegistrationState2 MCC: 460, MNC: 11, PS: Attached, DataCap: LTE [08-08_11:39:04:940] requestQueryDataCall IPv4ConnectionStatus: DISCONNECTED [08-08_11:39:04:941] ip addr flush dev wwan0 [08-08_11:39:04:947] ip link set dev wwan0 down [08-08_11:39:05:003] requestSetupDataCall WdsConnectionIPv4Handle: 0x8723e530 [08-08_11:39:05:132] ip link set dev wwan0 up [08-08_11:39:05:141] No default.script found, it should be in '/usr/share/udhcpc/' or '/etc//udhcpc' depend on your udhcpc version! [08-08_11:39:05:142] busybox udhcpc -f -n -q -t 5 -i wwan0 udhcpc: started, v1.30.1 udhcpc: sending discover udhcpc: sending select for 10.21.181.66 udhcpc: lease of 10.21.181.66 obtained, lease time 7200 [08-08_11:39:05:282] ip -4 address flush dev wwan0 [08-08_11:39:05:286] ip -4 address add 10.21.181.66/30 dev wwan0 [08-08_11:39:05:292] ip -4 route add default via 10.21.181.65 dev wwan0 ``` 查看网卡信息 ```bash jetson@jetson-desktop:~$ ifconfig wwan0 wwan0: flags=193此步骤可能需要进行半个小时以上
- 创建输出目录 ```bash cd ../../ mkdir kernel_out ``` - 编译安装内核 ```bash export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- #设置交叉编译工具 make -C kernel #构建 Jetson Linux 内核镜像 sudo -E make install -C kernel #安装内核模块和树内模块 ``` - 将内核镜像复制到刷机目录下 ```bash cp kernel/kernel-jammy-src/arch/arm64/boot/Image ../kernel/ ``` - 构建NVIDIA树外模块(驱动程序) ```bash export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src make modules ``` - 安装到刷机目录下 ```bash export INSTALL_MOD_PATH=$HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/rootfs/ #根据实际目录进行修改 sudo -E make modules_install ``` - 开始构建DTB ```bash export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src make dtbs ``` - 将生成的dtb文件拷贝到刷机目录 ```bash cp kernel-devicetree/generic-dts/dtbs/* ../kernel/dtb/ ``` ##### 刷写系统命令: - 普通模式 ```bash sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \ -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \ --showlogs --network usb0 jetson-orin-nano-devkit internal ``` - super模式 ```bash sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \ -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \ --showlogs --network usb0 jetson-orin-nano-devkit-super internal ``` ##### 仅刷写QSPI命令: - 普通模式 ```bash sudo ./flash.sh -c bootloader/t186ref/cfg/flash_t234_qspi.xml --no-systemimg jetson-orin-nano-devkit nvme0n1p1 ``` - super模式 ```bash sudo ./flash.sh -c bootloader/t186ref/cfg/flash_t234_qspi.xml --no-systemimg jetson-orin-nano-devkit-super nvme0n1p1 ``` # 自定义启动LOGO 开机时,开发板会进入UEFI引导系统启动,期间会显示NVIDIA默认的LOGO背景,如果您需要自定义该图片,需要按照一下操作获取UEFI源码替换图片内容重新编译UEFI并刷入到开发板中。 一、安装docker环境 如果已安装docker可以跳过此步骤,但要确保当前用户添加到`docker` 用户组 ``` sudo apt install docker.io ``` 将当前用户添加到`docker` 用户组后重启生效 ``` sudo usermod -a -G docker ${USER} sudo reboot ``` 设置变量 ``` export EDK2_DEV_IMAGE="ghcr.io/tianocore/containers/ubuntu-22-dev:latest" export EDK2_USER_ARGS="-v \"${HOME}\":\"${HOME}\" -e EDK2_DOCKER_USER_HOME=\"${HOME}\"" export EDK2_BUILD_ROOT="/build" export EDK2_BUILDROOT_ARGS="-v \"${EDK2_BUILD_ROOT}\":\"${EDK2_BUILD_ROOT}\"" alias edk2_docker="docker run -it --rm -w \"\$(pwd)\" ${EDK2_BUILDROOT_ARGS} ${EDK2_USER_ARGS} \"${EDK2_DEV_IMAGE}\"" ``` 拉取并验证环境 ```bash edk2_docker echo hello ``` [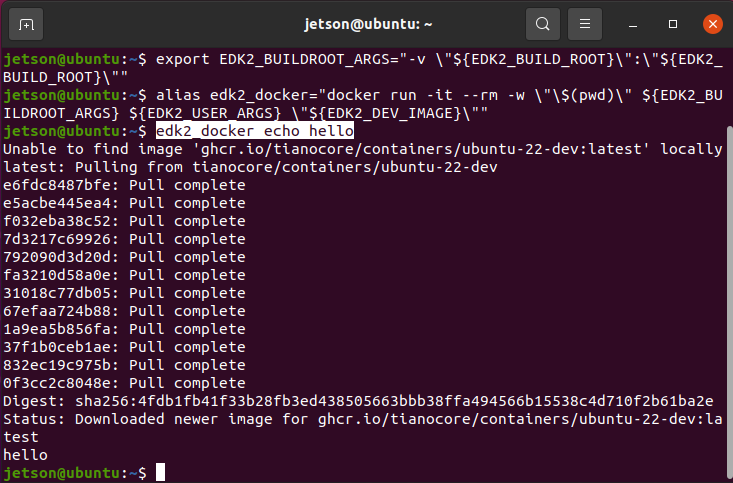](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-10/2rmimage.png) 二、拉取源码 初始化edk2环境 ``` edk2_docker init_edkrepo_conf edk2_docker edkrepo manifest-repos add nvidia https://github.com/NVIDIA/edk2-edkrepo-manifest.git main nvidia ``` 根据JetPack版本拉取uefi源码 (以**JetPack6.2.1**/**r36.4.4**为例) ``` edk2_docker edkrepo clone nvidia-uefi-r36.4.4 NVIDIA-Platforms r36.4.4-updates ``` 该过程会同步多个git项目,可能耗时较长。 同步完成后可以在以下目录找到默认的LOGO文件 ``` cd nvidia-uefi-r36.4.4/edk2-nvidia/Silicon/NVIDIA/Assets/ ``` [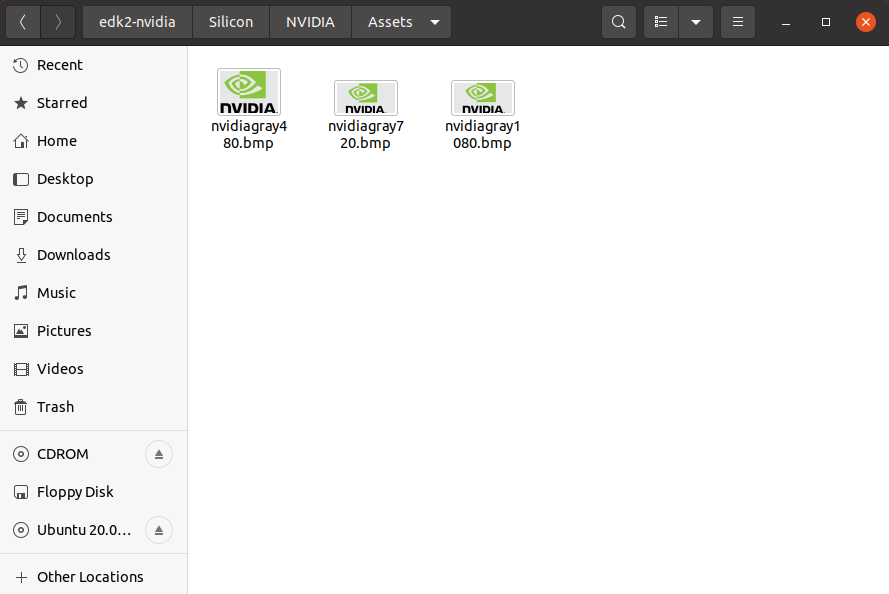](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-10/UKyimage.png) 您可以选择直接替换掉这三个分辨率的图片,也可以在下面的配置文件中更改引用的LOGO文件路径 ``` cd nvidia-uefi-r36.4.0/edk2-nvidia/Platform/NVIDIA/NVIDIA.fvmain.fdf.inc ``` [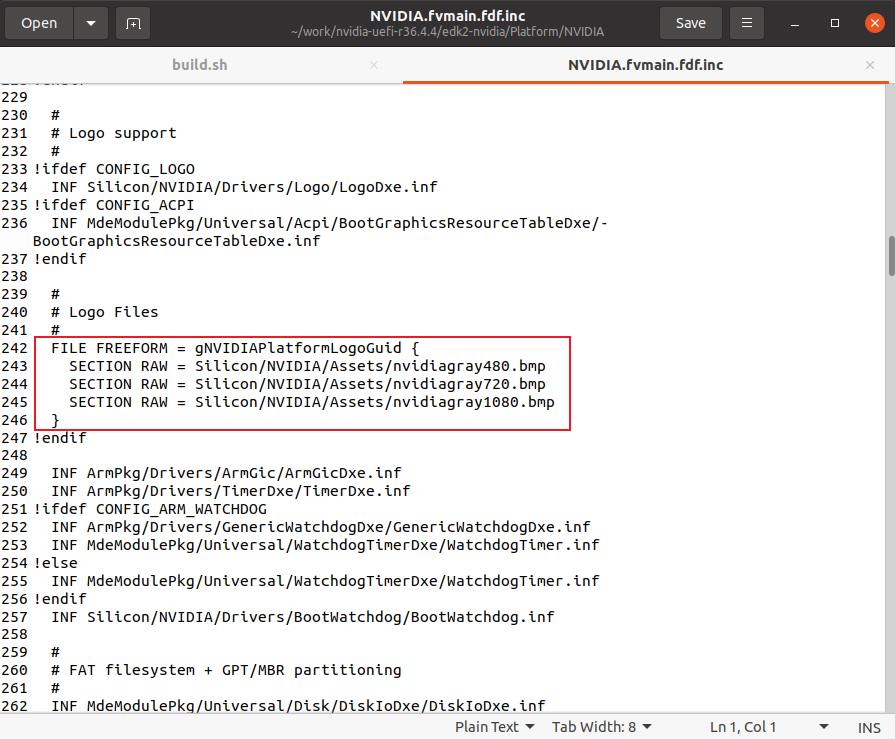](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-10/F9Eimage.png)应该尽可能地控制文件大小,最后的编译出的uefi\_xxx.bin**不得超过3.5MB**,否则刷入后开发板将无法启动。
三、编译 替换完成后,执行以下命令编译UEFI固件 ``` cd nvidia-uefi-r36.4.4/ edk2_docker edk2-nvidia/Platform/NVIDIA/Jetson/build.sh ``` [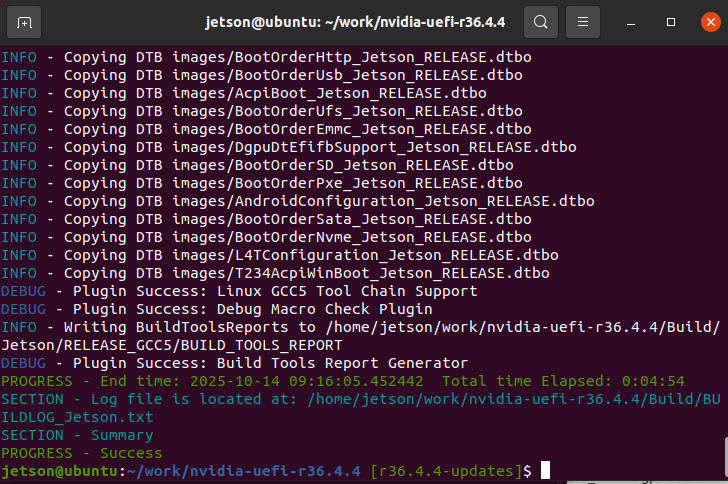](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-10/j8Uimage.png) 四、替换 五、刷入