# 五、其他外设
### 1. UART接口
##### 1.1使用 cutecom 操作UART
**cutecom** 是一个**跨平台的串口终端程序**,它提供了一个简洁直观的图形用户界面,允许用户通过串口接口发送和接收数据。运行以下命令以安装 **cutecom**
```bash
sudo apt install cutecom
```
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/EKf1.png)
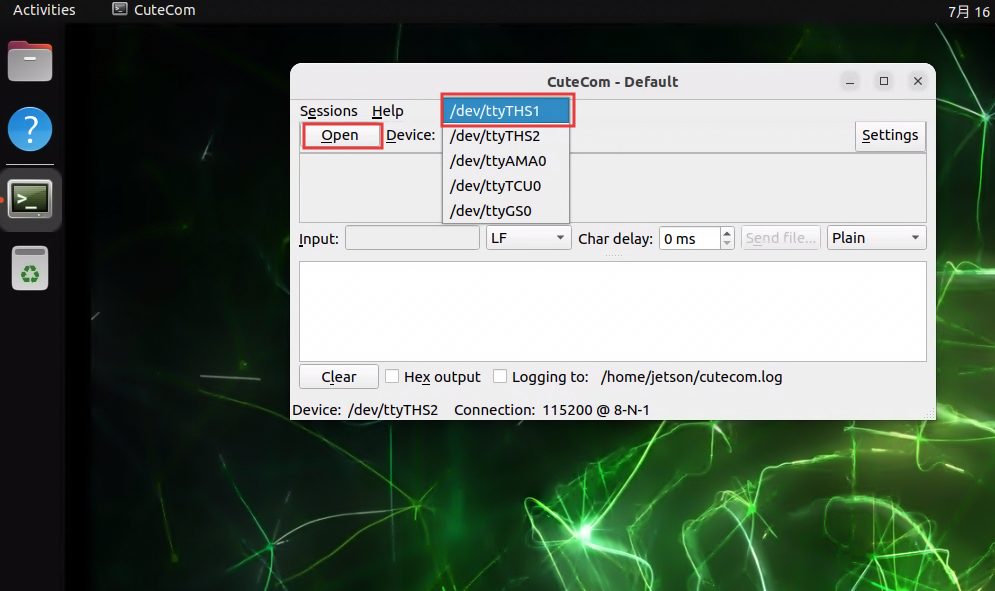
官方默认开启的UART接口为 **ttyTHS1** 即 40pin GPIO中的 **pin8 (TX)** 和 **pin10( RX)** 引脚。
- 使用一根条线短接8和10引脚
- 更改串口权限(临时授权)
```bash
sudo chmod 777 /dev/ttyTHS1
```
- 运行如下语句将当前用户加入到用户组。(可选,永久授权)
```bash
sudo usermod -aG dialout $USER
```
- 打开 **cutecom**,选择 **ttyTHS1** 并打开。
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/DfP8.png)
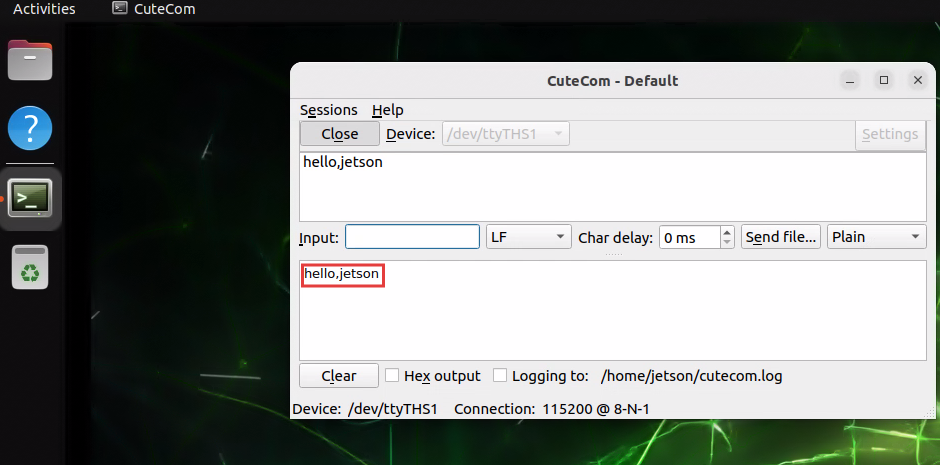
- 输入文本并回车,可以看到下方接收区显示有内容。
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/oY510.png)
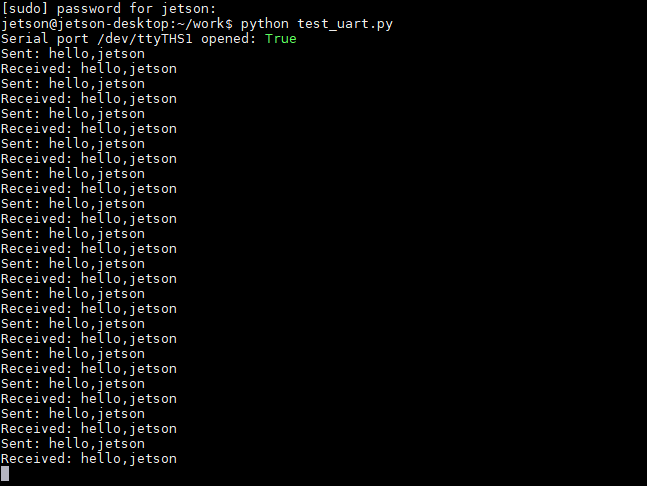
##### 1.2 使用 python 操作 UART
- 更改串口权限
```bash
sudo chmod 777 /dev/ttyTHS1
```
- 安装pyserial库
```bash
pip install pyserial
```
- 运行以下脚本进行测试
```python
import serial
import time
PORT = "/dev/ttyTHS1"
BAUDRATE = 115200
ENCODING = "UTF-8"
MESSAGE = "hello,jetson\r\n"
try:
with serial.Serial(PORT, BAUDRATE, timeout=2) as se:
print(f"Serial port {PORT} opened: {se.is_open}")
while True:
se.write(MESSAGE.encode(ENCODING))
print(f"Sent: {MESSAGE.strip()}")
try:
line = se.readline().decode(ENCODING).strip()
if line:
print(f"Received: {line}")
except Exception as e:
print(f"Read error: {e}")
time.sleep(1)
except serial.SerialException as e:
print(f"Serial error: {e}")
except KeyboardInterrupt:
print("\nExit by user.")
```
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/RJK11.png)
### 2. SPI接口
- 查看开发板spi资源
```bash
jetson@ubuntu:~/Downloads$ lsmod | grep -i spi
spidev 28672 0
spi_tegra114 32768 0
```
##### 2.1使用C/C++进行SPI通讯
以SPI0为例,使用条线短接19(),20号针脚
- 下载SPI例程
```bash
git clone https://github.com/rm-hull/spidev-test
```
- 编译源文件
```bash
cd spidev-test
gcc spidev_test.c -o spidev_test
```
- 运行例程
```bash
sudo modprobe spidev #启动官方spi驱动
./spidev_test -D /dev/spidev0.0 -s 100000 -p "\x11\x22\x33" -v
```
正确测试结果如下:
```bash
jetson@ubuntu:~/spidev-test$ ./spidev_test -D /dev/spidev0.0 -s 100000 -p "\x11\x22\x33" -v
spi mode: 0x0
bits per word: 8
max speed: 100000 Hz (100 KHz)
TX | 11 22 33 __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ | ."3
RX | 11 22 33 __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ __ | ."3
```
##### 2.1使用python进行SPI通讯
- 安装spidev库
```bash
pip install spidev
```
- 运行测试脚本
```python
import spidev
import time
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1_000_000
spi.mode = 0
TEST_DATA = [
[11], [22], [33]
]
for data in TEST_DATA:
resp = spi.xfer2(data)
print(f"recived:{resp}")
time.sleep(0.1)
spi.close()
```
正确测试结果如下:
```bash
(test) jetson@ubuntu:~/Downloads$ python test_spi.py
recived:[11]
recived:[22]
recived:[33]
```
### 3. I2C接口
- 安装i2c工具
```bash
sudo apt install i2c-tools
```
- 查看开发板可用的i2c的总线:
```bash
jetson@jetson-desktop:~$ i2cdetect -l
i2c-0 i2c 3160000.i2c I2C adapter
i2c-1 i2c c240000.i2c I2C adapter
i2c-2 i2c 3180000.i2c I2C adapter
i2c-4 i2c Tegra BPMP I2C adapter I2C adapter
i2c-5 i2c 31b0000.i2c I2C adapter
i2c-7 i2c c250000.i2c I2C adapter
i2c-9 i2c NVIDIA SOC i2c adapter 0 I2C adapter
```
- 查看连接到对应总线的i2c设备:
```bash
jetson@jetson-desktop:~$ i2cdetect -y -r -a 7
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: 00 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
```
- 正确接入i2c设备后:
```bash
i2cdetect -y -r -a 7
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- 3c -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
```
### 4. RTC接口
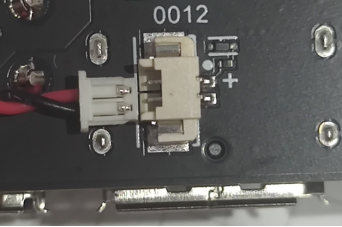
**实时时钟**(Real-Time Clock, **RTC**)是一种独立计时设备,可在系统断电或主电源关闭时持续提供精确的时间和日期信息。当开发板在**离线环境**下运行,并且**断电后仍需保持时间同步**时,就需要使用到RTC。
官方套件不支持RTC功能
载板RTC电池连接器型号为MX1.25-2P,使用电池时,请确认好极性,禁止接反电池
[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/gfZimage.png)
- 检查系统时间是否正确
```bash
timedatectl status
```
- 同步网络时间
```
sudo apt install ntpdate
sudo ntpdate cn.pool.ntp.org
```
- 设置时区
```
sudo timedatectl set-timezone Asia/Shanghai
```
- 同步系统时间到RTC硬件
```
sudo hwclock --systohc --utc --rtc /dev/rtc0 --noadjfile
```
- 检查RTC硬件时间
```
sudo hwclock --show --utc --rtc /dev/rtc0 --noadjfile
```
- 设置开机自动同步RTC时间
1. 打开文件
```
sudo vi /lib/systemd/system/hwrtc.service
```
2.写入以下内容
```bash
[Unit]
Description=Synchronise System clock to hardware RTC
DefaultDependencies=no
After=systemd-modules-load.service
Before=systemd-journald.service systemd-fsck-root.service time-sync.target sysinit.target shutdown.target
Conflicts=shutdown.target
[Service]
Type=oneshot
RemainAfterExit=yes
ExecStart=/sbin/hwclock --hctosys --utc --rtc /dev/rtc0 --noadjfile
RestrictRealtime=yes
[Install]
WantedBy=sysinit.target
```
3.设置开机自启动服务
```
sudo systemctl enable hwrtc.service
```
- 手动RTC硬件同步到系统时间
```
sudo hwclock --hctosys --utc --rtc /dev/rtc0 --noadjfile
```
- 关闭网络同步时间
```
sudo timedatectl set-ntp false
```