此方法需要提前使用SDK Maneger写入用户名和密码
##### 2.1将开发板连接到路由器,并接通电源开机 ##### 2.2-1通过路由器后台获取到开发板ip地址 不同品牌的路由器存在较大差异,请按照设备制造商的指引进行查询 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/fBZimage.png) ##### 2.2-2使用**advanced ip scanner**软件扫描同网段下的设备 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/image.png) 在刷入官方固件时,制造商信息为 **NVIDIA Corporation** 的设备即为开发板。 ##### 2.3 下载安装 **putty** 或 **MobaXterm** 等连接工具(下面以[MobaXterm](https://mobaxterm.mobatek.net/download.html)为例) ##### 2.4 点击 **session** 创建一个会话 [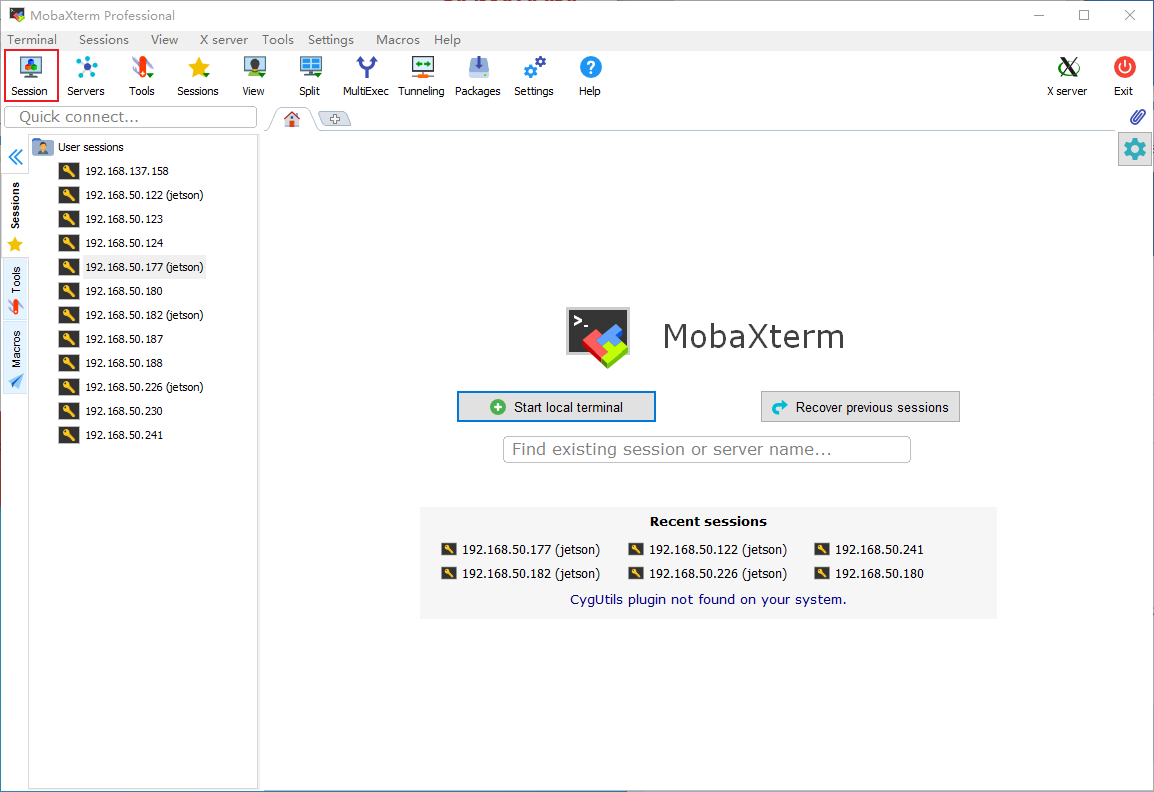](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/rBnimage.png) ##### 2.5 点击 **SSH** [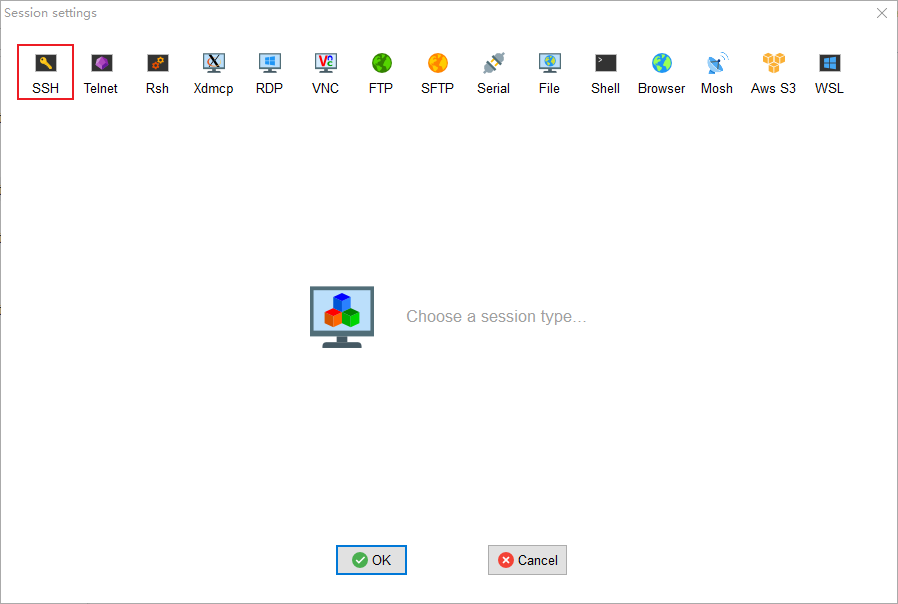](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/aDzimage.png) ##### 2.6 输入刚刚查询到的 IP 地址和刷入系统时或者自定义的用户名,完成后点击OK保存 [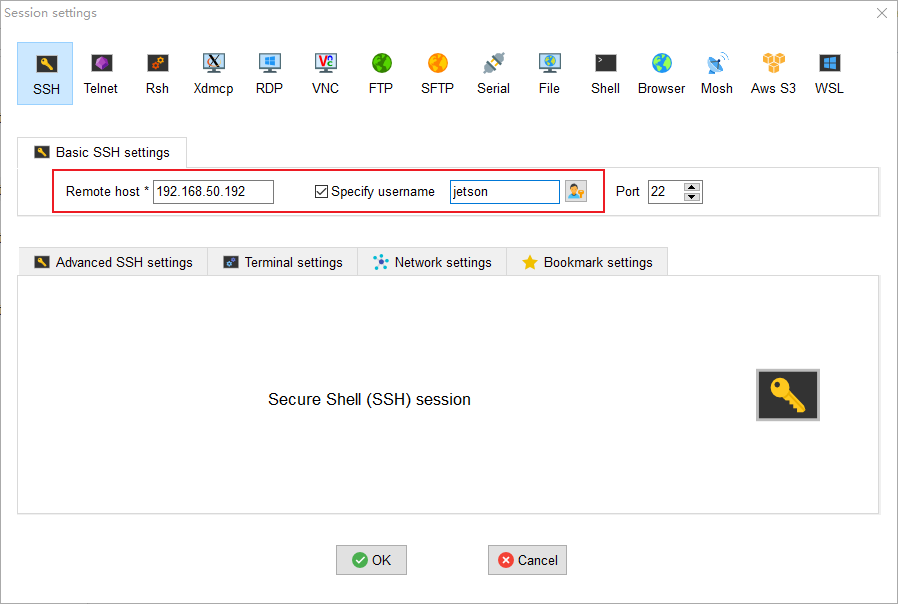](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/0S0image.png) ##### 2.7 输入密码(命令行不显示),完成后回车即可登录到系统。 [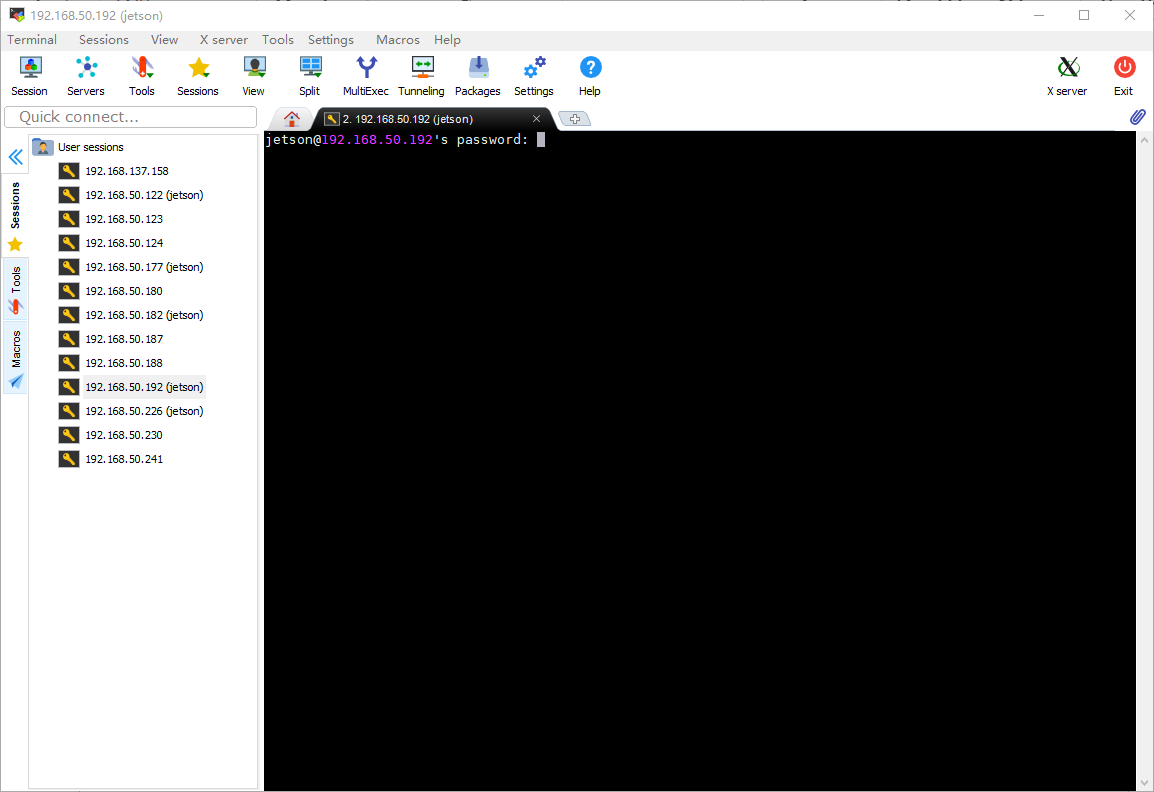](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/ryXimage.png) [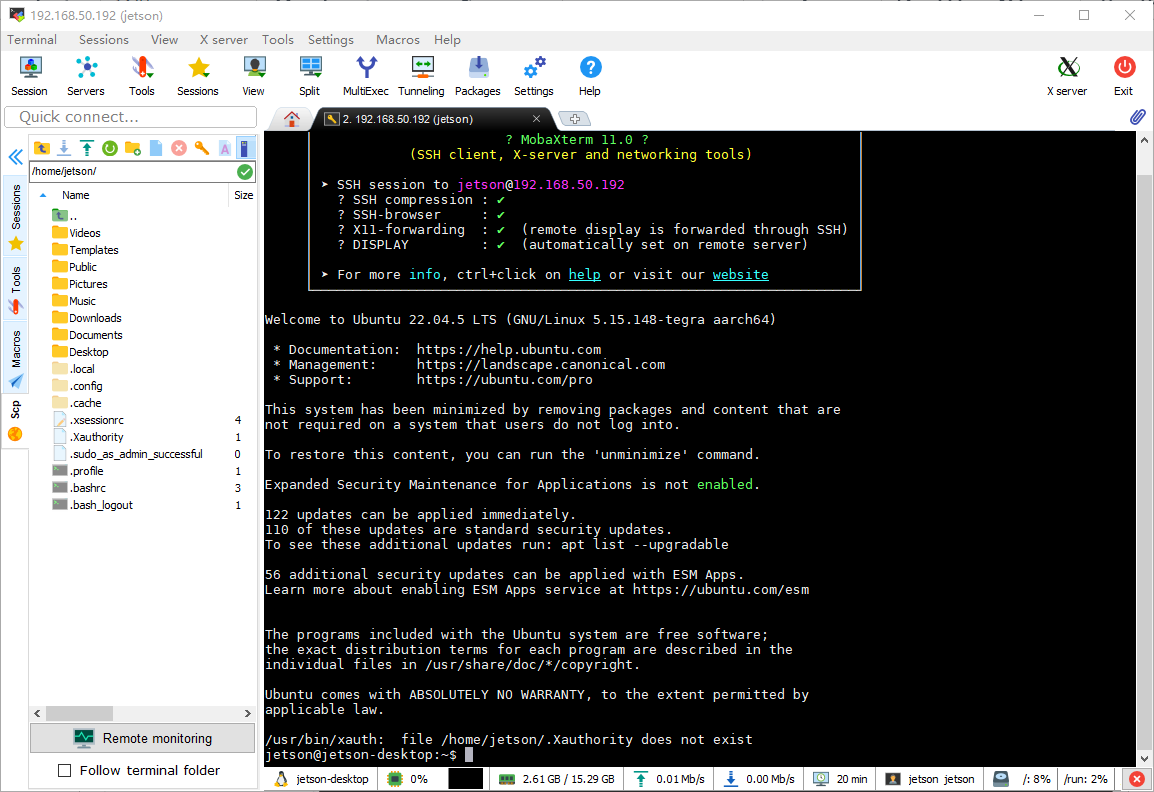](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/L2iimage.png) #### 3. 通过type-c连接到SSH ##### 3.1 在开发板正常上电开机 在默认模式下连接到主机后,Jetson默认作为主机,其IP地址为 **192.168.55.1** [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/5Kbimage.png) ##### 3.2 使用 **putty** 或 **MobaXterm** 等连接工具,连接到开发板 参考 **2.3** 节进行操作 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/xOtimage.png) #### 4. 远程连接到Jetson桌面环境在无显示器模式下建议使用HDMI/DP诱骗器确保桌面环境正常
##### 4.1 使用 NoMachine **NoMachine** 是一款功能强大、跨平台的远程桌面软件,专注于提供高速、高画质的远程访问体验。其核心基于 **NX 协议**,通过高效压缩和加密技术实现低延迟传输,特别适合图形密集型任务(如视频编辑、3D 渲染)和多场景协作。 - 主机下载安装NoMachine [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/15-8-2025-94138-www-nomachine-com.jpeg) - Jetson端下载安装NoMachine (下载页面参考: [NoMachine–arm\_version](https://download.nomachine.com/download/?id=30&platform=linux&distro=arm)) [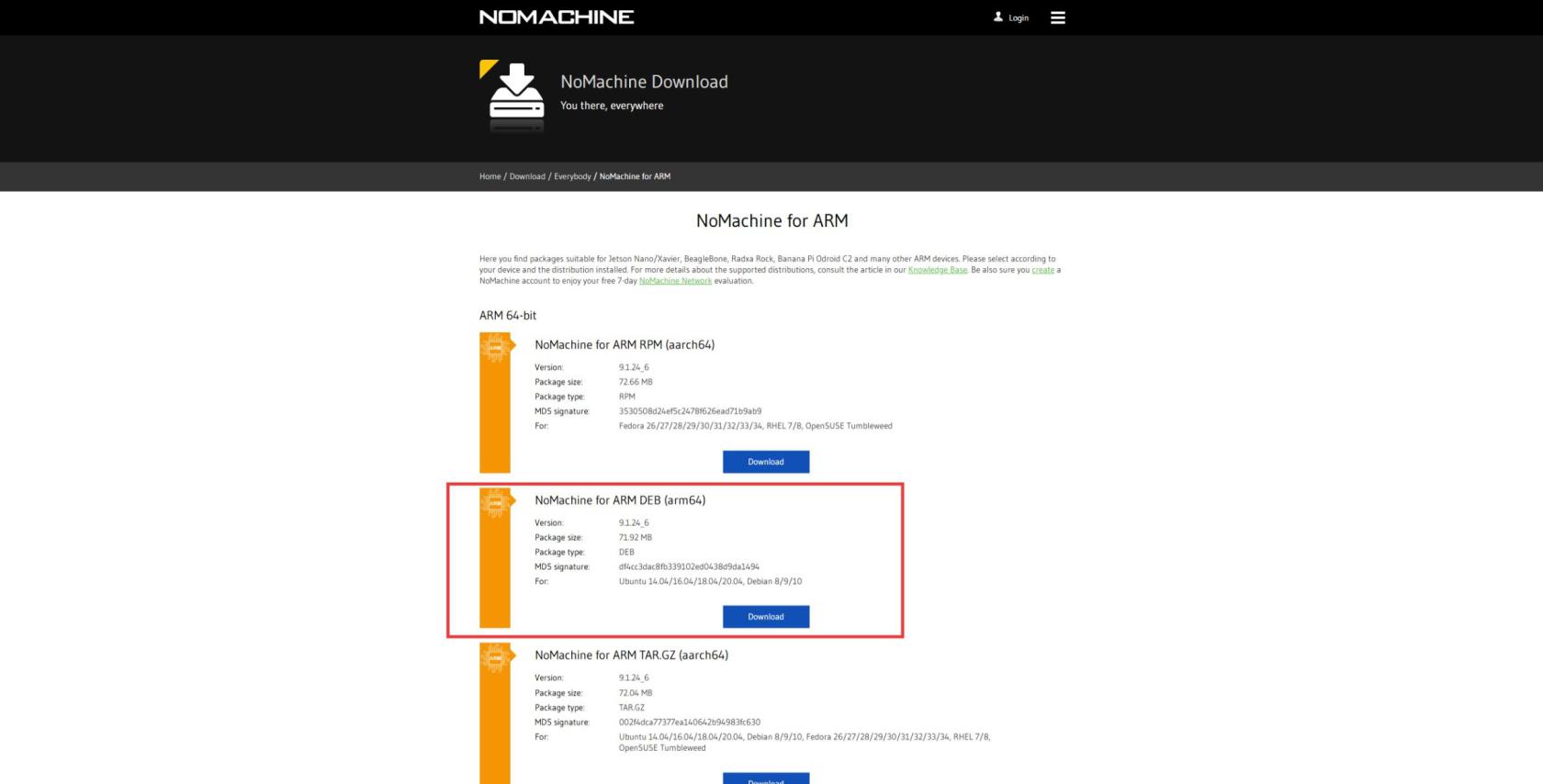](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/15-8-2025-95031-download-nomachine-com.jpeg) - 通过scp等方式上传到开发板(也可尝试复制下载链接通过命令行使用 wget 命令下载) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/VFBimage.png) - 命令行安装deb软件包 ```bash sudo dpkg -i nomachine_9.1.24_6_arm64.deb #随软件的更新包名可能发生变化 ``` - 主机和开发板都安装成功后将其连接到同一局域网下,在主机打开NoMachine便可自动搜索到Jetson服务端 [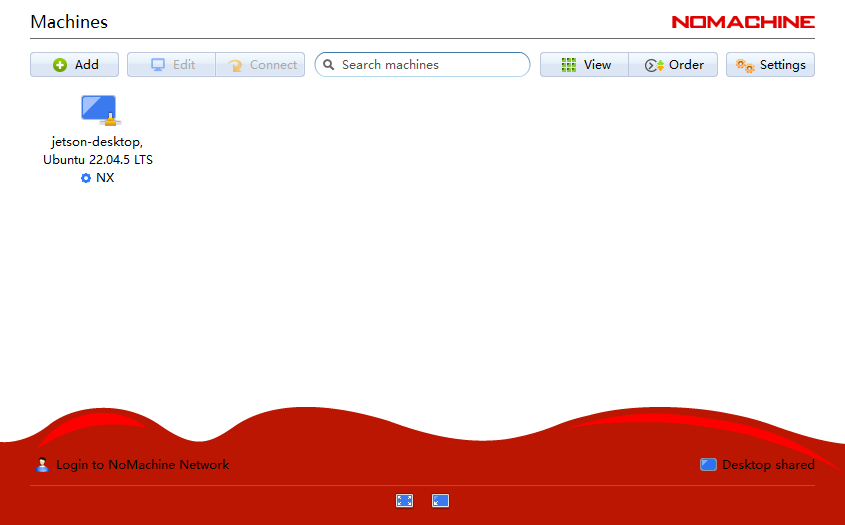](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/HD3image.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/9pQimage.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/4r1image.png) - 输入用户名和密码,点击OK [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/Anoimage.png) - 成功连接到桌面 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/A8Rimage.png) - 点击软件显示区域右上角可以进入设置调节画质、显示画幅和编码模式等选项 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/1LWimage.png) ##### 4.2 使用 VNC **VNC**(虚拟网络计算机)是一种基于图形界面的远程控制技术,允许用户通过网络(互联网或局域网)实时访问并操作另一台计算机的桌面环境。其核心协议为 **RFB(**Remote Framebuffer Protocol**)**,通过传输屏幕帧缓冲区的像素数据实现跨平台远程控制 - 下载安装主机端 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/cDeimage.png) - 在Jetson上进行如下设置 1. 设置VNC服务为开机自启 ``` cd /usr/lib/systemd/user/graphical-session.target.wants sudo ln -s ../vino-server.service ./. ``` 2. 配置VNC服务 ``` gsettings set org.gnome.Vino prompt-enabled false gsettings set org.gnome.Vino require-encryption false ``` 3. 设置VNC登录密码 ``` # 将 <密码> 替换为你要设置的密码 gsettings set org.gnome.Vino authentication-methods "['vnc']" gsettings set org.gnome.Vino vnc-password $(echo -n '密码'|base64) ``` 4. 重启系统生效 ``` sudo reboot ``` - 在主机的 **VNC** 软件中新建连接并输入 **Jetson** 的局域网 **IP** 并按回车确认 [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/P73image.png) - 输入密码并确认 [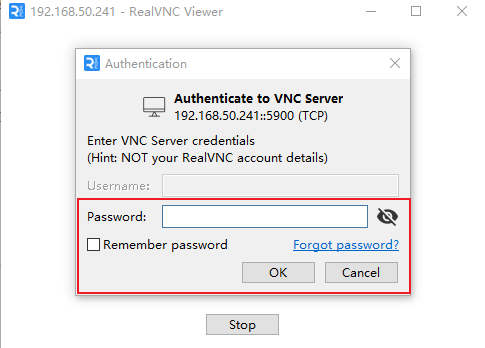](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/82Rimage.png) [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/bjaimage.png) 可参考英伟达官方说明 [Setting Up VNC | NVIDIA Developer](https://developer.nvidia.com/embedded/learn/tutorials/vnc-setup) # 摄像头 - 接入摄像头后,您可以使用以下指令查看现有摄像头的编号。 ```bash jetson@jetson-desktop:~$ ls /dev/video* /dev/video0 /dev/video1 ``` #### 1. CSI摄像头尽量避免带电操作,接入CSI摄像头时注意FPC排线金属触点一面朝下
##### 1.1 使用gst-launch打开摄像头 - 确认CSI摄像头正确连接后,分别在两个命令行窗口运行以下命令打开摄像头。 ```bash gst-launch-1.0 nvarguscamerasrc sensor-id=0 ! "video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,format=(string)NV12, framerate=(fraction)30/1" ! nvvidconv ! xvimagesink sync=false gst-launch-1.0 nvarguscamerasrc sensor-id=1 ! "video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,format=(string)NV12, framerate=(fraction)30/1" ! nvvidconv ! xvimagesink sync=false #打开另一个命令行窗口运行 ``` - **sensor-id**:指定摄像头物理接口 ID,双摄使用 `sensor-id=0` 和 `sensor-id=1`。 - **memory**:使用 NVIDIA GPU 内存(NVMM),减少延迟。 - **width, height**:设置分辨率,需硬件支持,例如 1080p。 - **format**:像素格式为 `NV12`(NVIDIA 编码器原生支持)。 - **framerate**:设置帧率,例如 `30/1`(30 FPS)。 - **sync**:`false` 禁用音视频同步,减少延迟。 [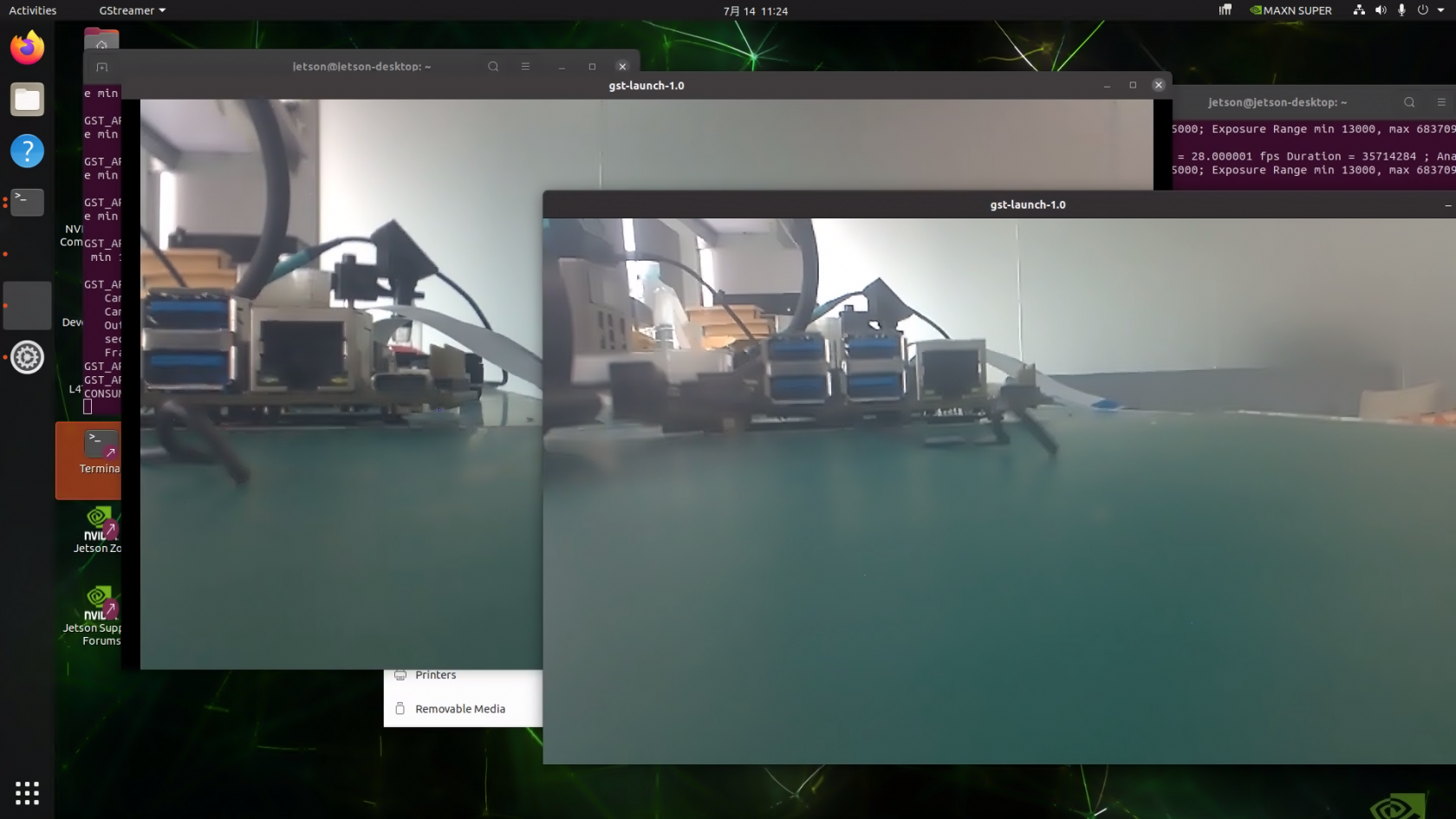](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/fXv4.png) #### 2. USB摄像头 - Cheese是一款简单易用的摄像头应用,它允许用户在Ubuntu系统中轻松地进行拍照、录像以及连拍等操作。运行以下命令以安装Cheese软件。 ```bash sudo apt install cheese ``` [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/IVR1.png) 将USB摄像头连接至开发板USB接口,并打开cheese软件 [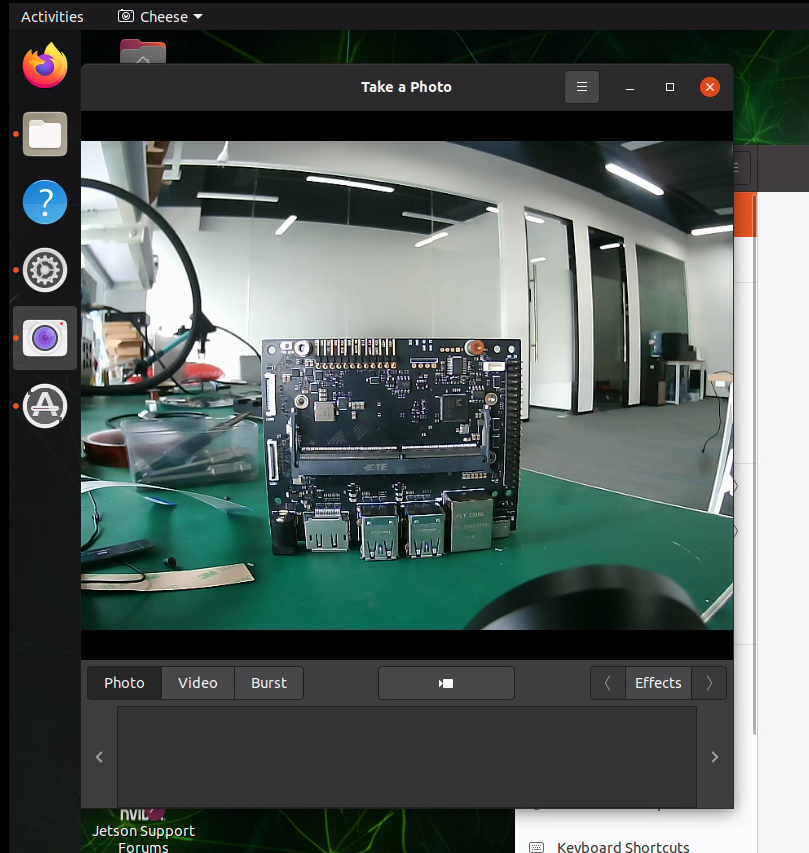](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/Goj3.png) --- - Guvcview是一款开源的图形用户界面软件,它为用户提供了简单直观的方式来捕捉视频。运行以下命令以安装guvcview软件。 ```bash sudo apt install guvcview ``` [](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/HZH7.png) [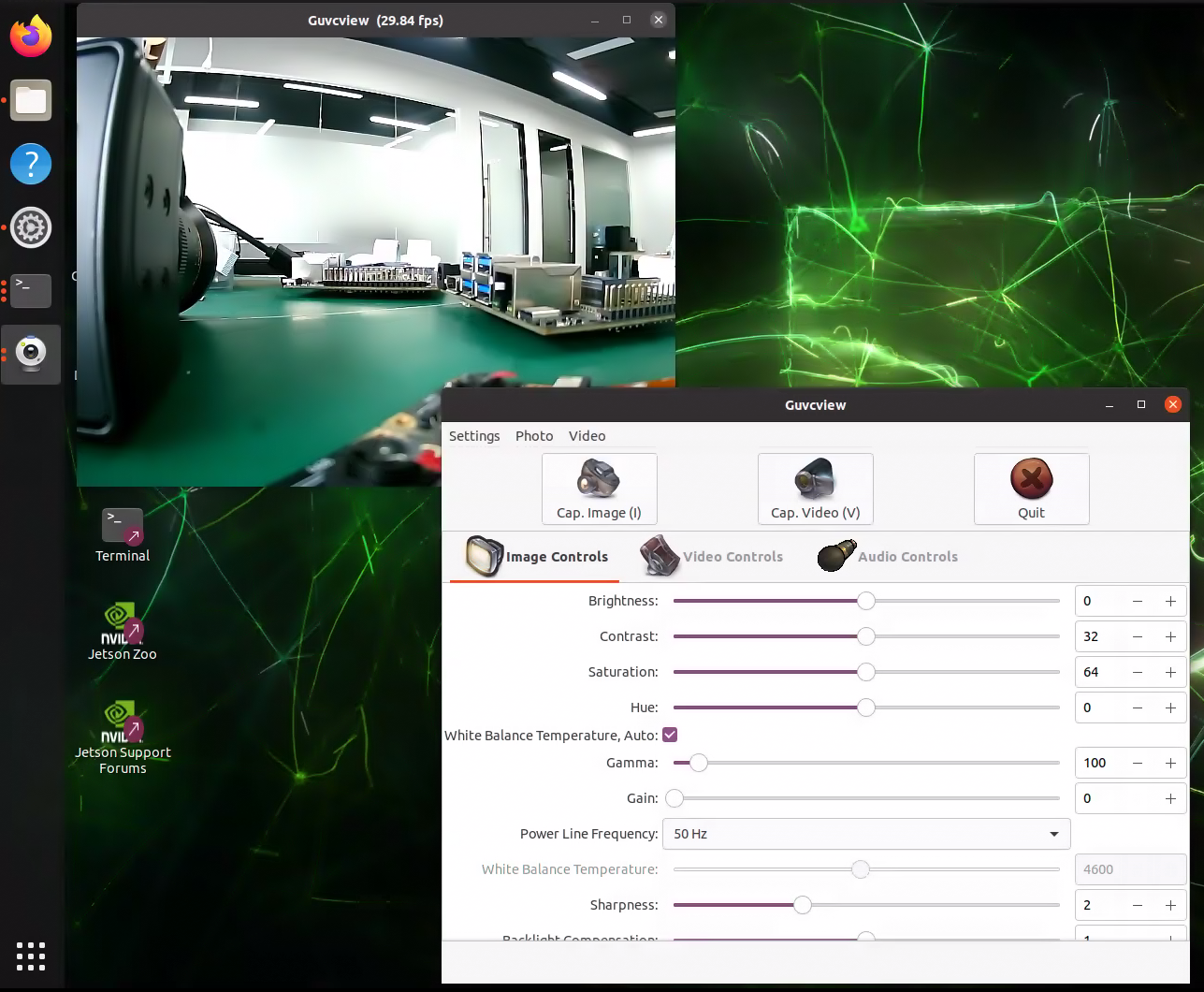](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/FWh8.png) 您也仍然可以使用nvgstcapture来打开USB摄像头 ```bash # V4L2 USB camera (where更详细的说明可参考[NVIDIA Developer](https://developer.nvidia.com/embedded/learn/tutorials/first-picture-csi-usb-camera)
# GPIO控制 GPIO(General-purpose input/output )是一种通用型输入输出接口,其脚位可由使用者编程控制。根据实际需要,这些脚位可以被设置为通用输入(GPI)、通用输出(GPO),或兼具输入输出功能(GPIO)。Jetson Orin Nano系列的40PIN GPIO引脚定义如下:[](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-07/jetson-orin-nano-expansion-header-j12-pinout.jpeg)
### 1 在JetPack 5系统中使用GPIO #### 1.1 使用命令行控制GPIO ##### 获取GPIO口的引脚名称与编号 以31号引脚为例,454为GPIO口编号,PQ.06为引脚名称 - 提升至root权限,启用GPIO口 ```bash sudo bash echo 454 > /sys/class/gpio/export ``` - 设置GPIO为输入模式 ```bash echo in > /sys/class/gpio/PQ.06/direction ``` - 获取GPIO当前状态,返回值1为高电平,0为低电平 ```bash cat /sys/class/gpio/PQ.06/value ``` - 设置GPIO为输出模式 ```bash echo out > /sys/class/gpio/PQ.06/direction ``` - 设置GPIO输出,1为高电平,0为低电平 ```bash echo 1 > /sys/class/gpio/PQ.06/value ``` 您也可以使用以下脚本进行测试 ```bash #!/bin/bash trap 'echo PQ.06 > /sys/class/gpio/unexport; echo "GPIO PQ.06 is released"' EXIT echo "setting GPIO PQ.06" echo PQ.06 > /sys/class/gpio/export 2>/dev/null # set Pin output mode echo out > /sys/class/gpio/PQ.06/direction # blink while true do echo 0 > /sys/class/gpio/PQ.06/value sleep 0.5 cat /sys/class/gpio/PQ.06/value sleep 0.5 echo 1 > /sys/class/gpio/PQ.06/value sleep 0.5 cat /sys/class/gpio/PQ.06/value sleep 0.5 done ``` #### 1.2 使用python控制GPIO ##### 1.2.1 安装JETSON.GPIO包 - 如果您不确定您的环境是否正常,或者您尝试使用**conda**环境运行脚本请执行以下指令安装Jetson官方的GPIO库 ```python pip install JETSON.GPIO ``` Jetson GPIO库提供了四种给I / O引脚编号的方法。 - **BOARD**:物理引脚编号(40针接口顺序)。 - **BCM**:Broadcom SoC 的 GPIO 编号(**常用**)。 - **CVM**:CVM/CVB 连接器的信号名称。 - **TEGRA\_SOC**:Tegra SoC 信号名称。 ```python import time import RPi.GPIO as GPIO # define pin number output_pin = 31 # set pin as BOARD mode GPIO.setmode(GPIO.BOARD) # set pin mode GPIO.setup(output_pin, GPIO.OUT) print("Press CTRL+C to exit") curr_value = GPIO.HIGH try: while True: time.sleep(1) print("pin {} now is {}".format(output_pin, curr_value)) GPIO.output(output_pin, curr_value) # blink curr_value ^= GPIO.HIGH finally: GPIO.cleanup() ``` 其他具体用法和例程可参考[项目官网](https://sourceforge.net/p/raspberry-gpio-python/wiki/Examples/) #### 1.3使用C/C++控制GPIO - 安装libgpio-dev ``` sudo apt install libgpio-dev ``` 参考例程: ```c++ /** * License - MIT. */ #include在JetPack6 系统中仍需要修改寄存器内容来更改引脚GPIO模式以使用高级语言控制GPIO
- 将 PQ.06 引脚设置为输出模式 ```bash sudo busybox devmem 0x2430070 w 0x004 ``` - 如果您尝试使用 conda 环境运行脚本请执行以下指令安装 Jetson 官方的 GPIO 库 ```python pip install JETSON.GPIO ``` - 建议执行以下指令,重新安装系统自带的 JETSON.GPIO 库 ```bash sudo rm -rf /usr/lib/python3*/dist-packages/Jetson sudo rm -rf /usr/local/lib/python3*/dist-packages/Jetson git clone https://github.com/NVIDIA/jetson-gpio.git cd jetson-gpio sudo pip3 install . ``` Jetson GPIO 库提供了四种给I / O引脚编号的方法。 - **BOARD**:物理引脚编号(40针接口顺序)。 - **BCM**:Broadcom SoC 的 GPIO 编号(**常用**)。 - **CVM**:CVM/CVB 连接器的信号名称。 - **TEGRA\_SOC**:Tegra SoC 信号名称。 ```python import time import RPi.GPIO as GPIO # define pin number PQ.06 output_pin = 31 # set pin as BOARD mode GPIO.setmode(GPIO.BOARD) # set pin mode GPIO.setup(output_pin, GPIO.OUT) print("Press CTRL+C to exit") curr_value = GPIO.HIGH try: while True: time.sleep(1) print("pin {} now is {}".format(output_pin, curr_value)) GPIO.output(output_pin, curr_value) # blink curr_value ^= GPIO.HIGH finally: GPIO.cleanup() ``` 其他具体用法和例程可参考[项目官网](https://sourceforge.net/p/raspberry-gpio-python/wiki/Examples/) #### 2.3使用C/C++控制GPIO在JetPack6 系统中仍需要修改寄存器内容来更改引脚GPIO模式以使用高级语言控制GPIO
- 将 PQ.06 引脚设置为输出模式 ```bash sudo busybox devmem 0x2430070 w 0x004 ``` - 安装libgpio-dev ``` sudo apt install libgpiod-dev ``` 参考例程: ```c++ /** * License - MIT. */ #includeC1901/1902 **未配置** CAN 收发芯片,仅输出CAN\_TX, CAN\_RX信号。
C2401设置有 CAN 收发芯片,通过总线通讯时,需要将**拨码开关1**调整至 **ON** 接入120Ω电阻,输出CAN\_H, CAN\_L信号。[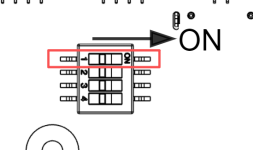](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-12/9svimage.png)
##### CAN总线配置方法 1\. 挂载相关内核模块 ```bash sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan ``` 2\. 安装CAN工具进行收发操作 ``` sudo apt-get install can-utils ``` 3\. 将CAN0波特率设置成10k ```bash sudo ip link set down can0 sudo ip link set can0 type can bitrate 10000 #每次调整波特率前都需要先关闭端口 sudo ip link set up can0 ``` 4\. 发送数据 ``` cansend can0 123#00.00.00.00.11.11.11.11 ``` 5\. 接收数据 ```bash candump can0 & ``` 查看can网络情况 ```bash jetson@jetson-desktop:~$ ifconfig can0: flags=193官方套件不支持RTC功能
载板RTC电池连接器型号为MX1.25-2P,使用电池时,请确认好极性,禁止接反电池
[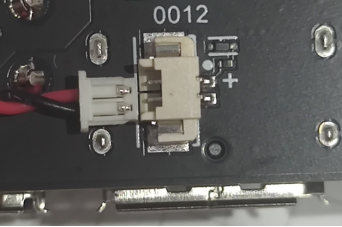](https://www.linkzeelabs.com/wiki/uploads/images/gallery/2025-08/gfZimage.png) - 检查系统时间是否正确 ```bash timedatectl status ``` - 同步网络时间 ``` sudo apt install ntpdate sudo ntpdate cn.pool.ntp.org ``` - 设置时区 ``` sudo timedatectl set-timezone Asia/Shanghai ``` - 同步系统时间到RTC硬件 ``` sudo hwclock --systohc --utc --rtc /dev/rtc0 --noadjfile ``` - 检查RTC硬件时间 ``` sudo hwclock --show --utc --rtc /dev/rtc0 --noadjfile ``` - 设置开机自动同步RTC时间 1. 打开文件 ``` sudo vi /lib/systemd/system/hwrtc.service ``` 2.写入以下内容 ```bash [Unit] Description=Synchronise System clock to hardware RTC DefaultDependencies=no After=systemd-modules-load.service Before=systemd-journald.service systemd-fsck-root.service time-sync.target sysinit.target shutdown.target Conflicts=shutdown.target [Service] Type=oneshot RemainAfterExit=yes ExecStart=/sbin/hwclock --hctosys --utc --rtc /dev/rtc0 --noadjfile RestrictRealtime=yes [Install] WantedBy=sysinit.target ``` 3.设置开机自启动服务 ``` sudo systemctl enable hwrtc.service ``` - 手动RTC硬件同步到系统时间 ``` sudo hwclock --hctosys --utc --rtc /dev/rtc0 --noadjfile ``` - 关闭网络同步时间 ``` sudo timedatectl set-ntp false ```