JETSON ORIN NANO 进阶教程
本章主要Jetson特色的AI功能使用
- 安装jtop
- 安装CUDA
- 编译安装opencv with cuda
- 安装使用pytorch和torchvision
- 安装使用ollama
- 安装使用Jetson-container
- 网卡驱动
- 4G模块使用说明
- 基础镜像制作
- 自定义启动LOGO
安装jtop
jtop 是英伟达专为 Jetson 系列边缘计算设备开发的交互式系统监控工具。
1 安装jtop
- 安装jtop需要的依赖库
sudo apt update
sudo apt install python3
sudo apt install python3-pip- 安装jtop
sudo pip3 install -U pip -i https://pypi.tuna.tsinghua.edu.cn/simple
sudo pip3 install jetson-stats -i https://pypi.tuna.tsinghua.edu.cn/simple
sudo systemctl restart jtop.service2 jtop的使用
- 安装完成后在控制台中输入
jtop打开主界面
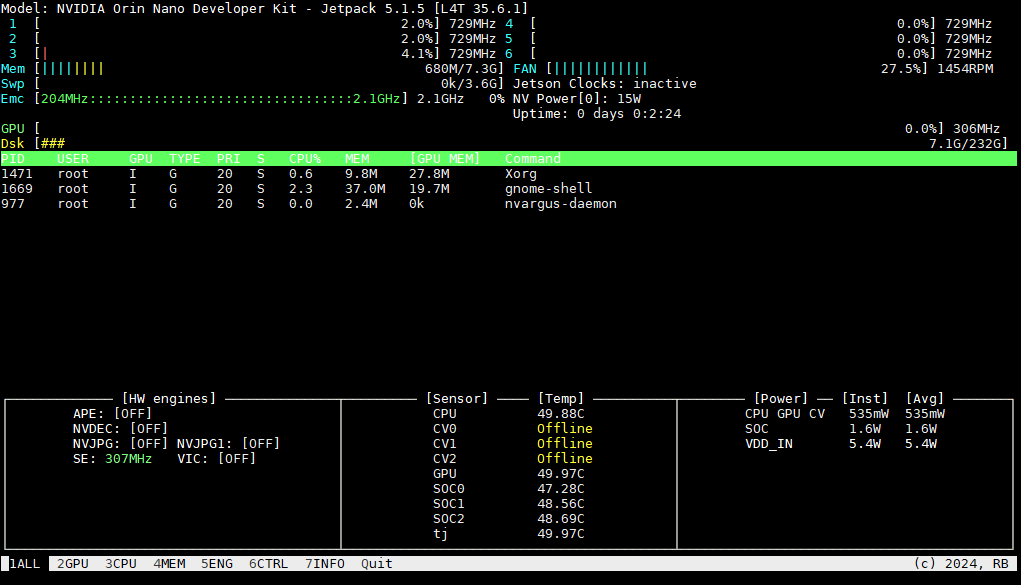
2.1 监视各个模块的工作信息
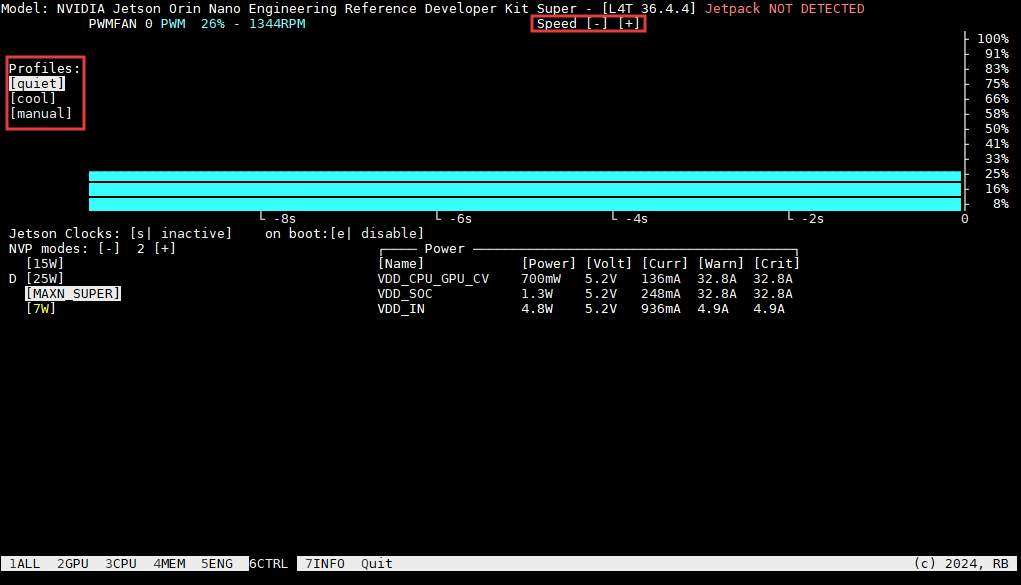
2.2 控制风扇
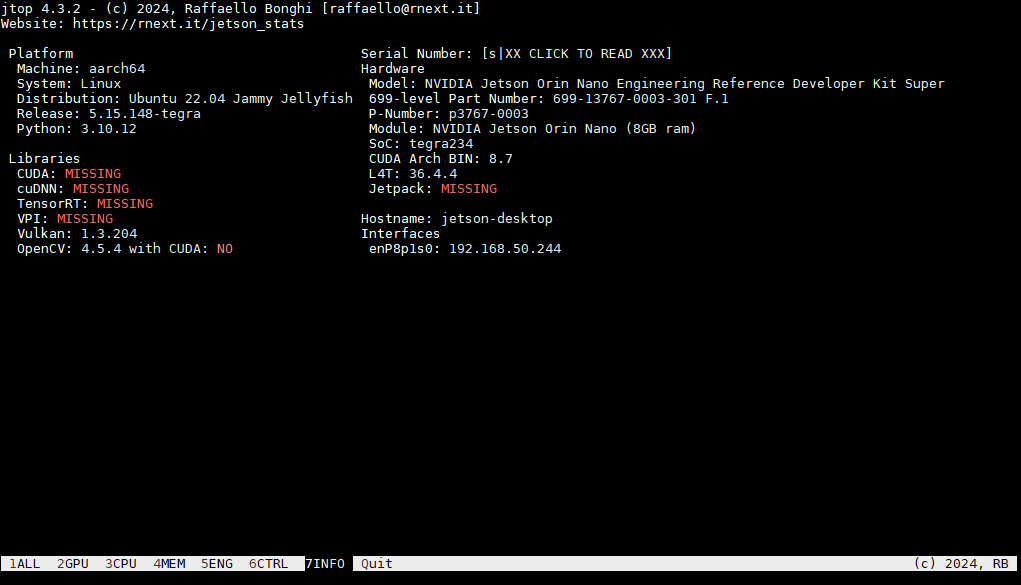
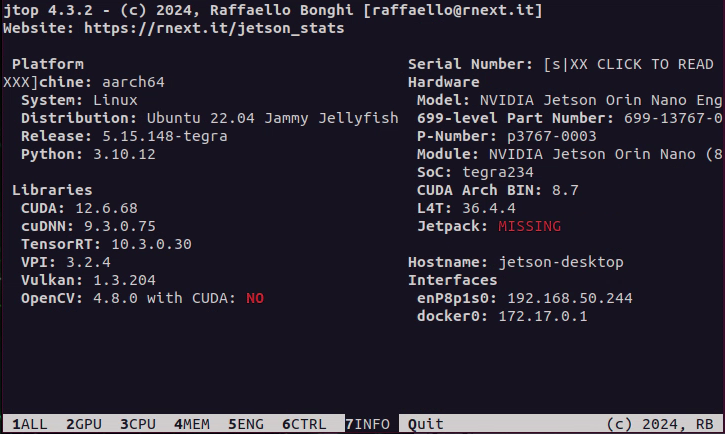
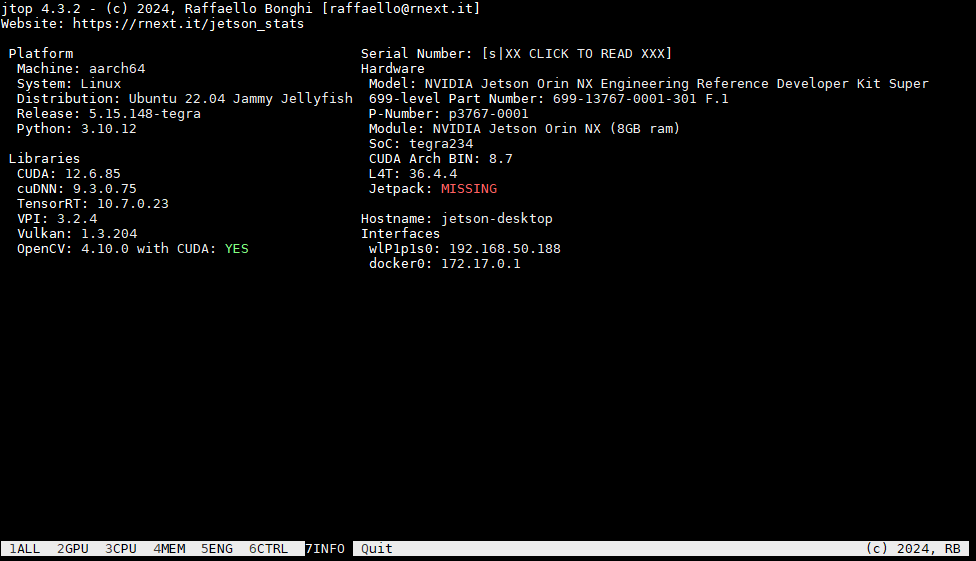
2.3 查看内置软件信息
安装CUDA
Jetson CUDA是NVIDIA为边缘AI设计的并行计算平台,基于ARM的Jetson系列硬件,支持GPU加速深度学习与实时推理,低功耗高性能。
安装CUDA JETSON SDK
sudo apt update
sudo apt install nvidia-jetpack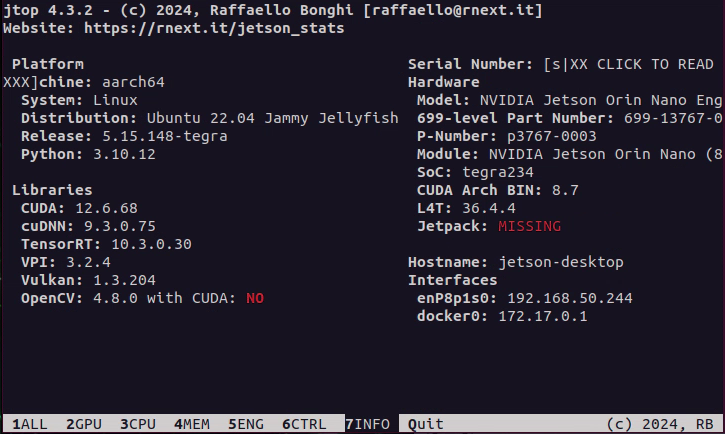
对开发板进行压力测试
以下测试仅在 JetPack 6.1 (rev1) 和 JetPack 5.1.5 版本中通过验证
调整功耗上限:
sudo nvpmodel -m 2 #nano 模式2为super
sudo jetson_clocks --fancpu压力测试:
sudo apt install stress
stress --cpu 8 --io 4 --vm 2 --vm-bytes 128M --hdd 1 --hdd-bytes 1024M
gpu压力测试:
git clone https://github.com/anseeto/jetson-gpu-burn/
cd jetson-gpu-burn
make
./gpu_burn 100000状态查询:
sudo jtop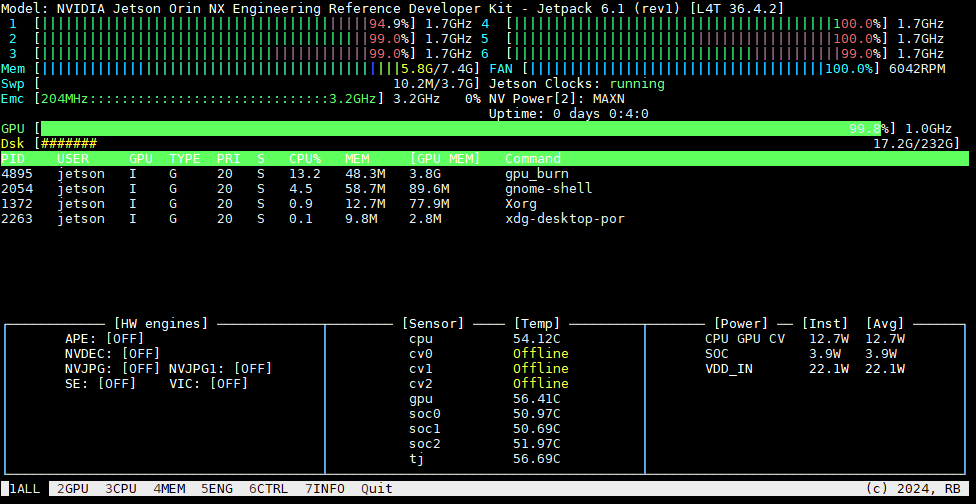
Orin Nano 整机最大功率为30W.
Orin NX 整机最大功率为40W.
编译安装opencv with cuda
JetPack预装的opencv没有启用cuda,需要自行编译安装。
1. 脚本一键安装
#!/bin/bash
# opencv_install.sh
# Modified from https://github.com/AastaNV/JEP/blob/master/script/install_opencv4.10.0_Jetpack6.1.sh
version="4.10.0"
folder="workspace"
remove_old=""
set -e
# Parse command-line arguments
for arg in "$@"; do
case $arg in
--version=*)
version="${arg#*=}"
;;
--folder=*)
folder="${arg#*=}"
;;
--remove-old=*)
remove_old="${arg#*=}"
;;
--help|-h)
echo "Usage: $0 [--version=4.x.x] [--folder=dir] [--remove-old=yes/no]"
exit 0
;;
*)
echo "Unknown parameter: $arg"
echo "Usage: $0 [--version=4.x.x] [--folder=dir] [--remove-old=yes/no]"
exit 1
;;
esac
done
# Create installation directory if it doesn't exist
if [ ! -d "$folder" ]; then
echo "Creating directory: $folder"
mkdir -p "$folder"
fi
cd "$folder" || exit
# Old OpenCV removal logic
if [ -z "$remove_old" ]; then
read -rp "Do you want to remove system-installed OpenCV? (yes/no): " remove_old
fi
case "$remove_old" in
[yY] | [yY][eE][sS])
echo "** Removing system OpenCV packages"
sudo apt -y purge *libopencv*
sudo apt -y autoremove
;;
*)
echo "** Skipping system OpenCV removal"
;;
esac
echo "------------------------------------"
echo "** Installing dependencies (1/4)"
echo "------------------------------------"
sudo apt-get update
sudo apt-get install -y build-essential cmake git libgtk2.0-dev pkg-config \
libavcodec-dev libavformat-dev libswscale-dev libgstreamer1.0-dev \
libgstreamer-plugins-base1.0-dev python3-dev python3-numpy libtbb2 \
libtbb-dev libjpeg-dev libpng-dev libtiff-dev libv4l-dev v4l-utils qv4l2 curl
# Verify essential dependencies installed
for dep in g++ cmake git pkg-config; do
if ! command -v "$dep" > /dev/null; then
echo "Error: $dep installation failed"
exit 1
fi
done
echo "------------------------------------"
echo "** Downloading OpenCV ${version} (2/4)"
echo "------------------------------------"
# Check if source files already exist
download_opencv=false
download_contrib=false
if [ ! -f "opencv-${version}.zip" ]; then
echo "Downloading opencv-${version}.zip"
wget -O opencv-${version}.zip https://github.com/opencv/opencv/archive/${version}.zip || {
echo "Download failed! Check your internet connection or verify the version exists"
exit 1
}
download_opencv=true
else
echo "opencv-${version}.zip exists, skipping download"
fi
if [ ! -f "opencv_contrib-${version}.zip" ]; then
echo "Downloading opencv_contrib-${version}.zip"
wget -O opencv_contrib-${version}.zip https://github.com/opencv/opencv_contrib/archive/${version}.zip || {
echo "Download failed! Check your internet connection or verify the version exists"
exit 1
}
download_contrib=true
else
echo "opencv_contrib-${version}.zip exists, skipping download"
fi
# Unpack source files
if [ ! -d "opencv-${version}" ] || $download_opencv; then
if [ -d "opencv-${version}" ]; then
echo "Removing existing opencv-${version} directory"
rm -rf "opencv-${version}"
fi
echo "Unpacking opencv-${version}.zip"
unzip -q opencv-${version}.zip || {
echo "Extraction failed! File may be corrupt"
exit 1
}
fi
if [ ! -d "opencv_contrib-${version}" ] || $download_contrib; then
if [ -d "opencv_contrib-${version}" ]; then
echo "Removing existing opencv_contrib-${version} directory"
rm -rf "opencv_contrib-${version}"
fi
echo "Unpacking opencv_contrib-${version}.zip"
unzip -q opencv_contrib-${version}.zip || {
echo "Extraction failed! File may be corrupt"
exit 1
}
fi
# Clean up zip files after successful extraction
if [ $? -eq 0 ]; then
rm -f opencv-${version}.zip opencv_contrib-${version}.zip
fi
cd opencv-${version} || exit
echo "------------------------------------"
echo "** Building OpenCV ${version} (3/4)"
echo "------------------------------------"
mkdir -p release
cd release
# Auto-detect CUDA architecture
cuda_arch=""
if command -v nvidia-smi &> /dev/null; then
gpu_name=$(nvidia-smi --query-gpu=name --format=csv,noheader | head -n1)
if [[ $gpu_name == *"Orin"* ]] || [[ $gpu_name == *"Jetson"* ]]; then
cuda_arch="8.7"
elif [[ $gpu_name == *"A100"* ]]; then
cuda_arch="8.0"
fi
fi
cmake_cmd="cmake -D WITH_CUDA=ON -D WITH_CUDNN=ON -D OPENCV_GENERATE_PKGCONFIG=ON "
cmake_cmd+="-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-${version}/modules "
cmake_cmd+="-D WITH_GSTREAMER=ON -D WITH_LIBV4L=ON -D BUILD_opencv_python3=ON "
cmake_cmd+="-D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_EXAMPLES=OFF "
cmake_cmd+="-D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local "
# Add CUDA architecture if detected
if [ -n "$cuda_arch" ]; then
echo "Detected NVIDIA GPU: ${gpu_name}, using CUDA_ARCH_BIN=${cuda_arch}"
cmake_cmd+="-D CUDA_ARCH_BIN=${cuda_arch} -D CUDA_ARCH_PTX=\"\" "
else
echo "No supported GPU detected, skipping CUDA architecture flags"
fi
# Execute CMake configuration
echo "CMake command: $cmake_cmd .."
$cmake_cmd .. || {
echo "CMake configuration failed"
exit 1
}
# Parallel build (leave one core for system stability)
cpu_cores=$(($(nproc) - 1))
[ $cpu_cores -lt 1 ] && cpu_cores=1
echo "Building with ${cpu_cores} CPU cores"
make -j${cpu_cores} || {
echo "Compilation failed"
exit 1
}
echo "------------------------------------"
echo "** Installing OpenCV ${version} (4/4)"
echo "------------------------------------"
sudo make install || {
echo "Installation failed"
exit 1
}
# Add environment variables to .bashrc (only if not already present)
bashrc=~/.bashrc
env_lines=(
"export LD_LIBRARY_PATH=/usr/local/lib:\$LD_LIBRARY_PATH"
"export PYTHONPATH=/usr/local/lib/python3.10/site-packages/:\$PYTHONPATH"
)
for line in "${env_lines[@]}"; do
if ! grep -Fxq "$line" "$bashrc"; then
echo "Adding to .bashrc: $line"
echo "$line" >> "$bashrc"
else
echo "Environment variable already exists: $line"
fi
done
source ~/.bashrc
echo "** OpenCV ${version} installation completed"
echo "Verification commands:"
echo " pkg-config --modversion opencv4"
echo " python3 -c 'import cv2; print(cv2.__version__)'"
echo "** Installation successful!"2. 手动安装
2.1 卸载自带opencv
sudo apt-get purge libopencv*
sudo apt autoremove
sudo apt-get update2.2 安装前置软件包
sudo apt-get update
sudo apt-get install -y build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install -y libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python3.10-dev python3-numpy
sudo apt-get install -y libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libv4l-dev v4l-utils qv4l2
sudo apt-get install -y curl2.3 获取opencv源码(以4.10.0版本为例)
version=4.10.0
wget -O "opencv-${version}.zip" "https://github.com/opencv/opencv/archive/${version}.zip"
wget -O "opencv_contrib-${version}.zip" "https://github.com/opencv/opencv_contrib/archive/${version}.zip"
unzip "opencv-${version}.zip"
unzip "opencv_contrib-${version}.zip"
rm "opencv-${version}.zip" "opencv_contrib-${version}.zip"
cd "opencv-${version}/"2.4 编译源码
此步骤至少需要半小时以上。
中途可能会下载第三方软件包,建议提前确认网络环境。
mkdir build
cd build/
cmake -D WITH_CUDA=ON -D WITH_CUDNN=ON -D CUDA_ARCH_BIN="8.7" -D CUDA_ARCH_PTX="" -D OPENCV_GENERATE_PKGCONFIG=ON -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-${version}/modules -D WITH_GSTREAMER=ON -D WITH_LIBV4L=ON -D BUILD_opencv_python3=ON -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_EXAMPLES=OFF -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j$(nproc)2.5 安装
sudo make install
echo 'export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH' >> ~/.bashrc
echo 'export PYTHONPATH=/usr/local/lib/python3.10/site-packages/:$PYTHONPATH' >> ~/.bashrc
source ~/.bashrc三、验证测试
#--test_cuda.cpp
#include <opencv2/opencv.hpp>
#include <opencv2/core/cuda.hpp>
#include <opencv2/cudaarithm.hpp>
#include <iostream>
#include <chrono>
// CPU 矩阵乘法
void cpu_matrix_mult(cv::Mat& a, cv::Mat& b, cv::Mat& result) {
for (int i = 0; i < 50; i++) {
result = a * b;
}
}
// GPU 矩阵乘法
void gpu_matrix_mult(cv::cuda::GpuMat& d_a, cv::cuda::GpuMat& d_b, cv::cuda::GpuMat& d_result) {
cv::cuda::Stream stream;
for (int i = 0; i < 50; i++) {
cv::cuda::gemm(d_a, d_b, 1.0, cv::cuda::GpuMat(), 0, d_result, 0, stream);
stream.waitForCompletion();
}
}
int main() {
try {
std::cout << "--- OpenCV CUDA Matrix Multiplication Test ---\n";
// 创建两个 1000x1000 的随机矩阵
cv::Mat mat_a(1000, 1000, CV_32FC1);
cv::Mat mat_b(1000, 1000, CV_32FC1);
cv::randu(mat_a, 0.0f, 1.0f);
cv::randu(mat_b, 0.0f, 1.0f);
cv::Mat cpu_result;
// CPU 测试
auto start_cpu = std::chrono::high_resolution_clock::now();
cpu_matrix_mult(mat_a, mat_b, cpu_result);
auto end_cpu = std::chrono::high_resolution_clock::now();
double cpu_time = std::chrono::duration_cast<std::chrono::milliseconds>(end_cpu - start_cpu).count();
// GPU 测试
cv::cuda::GpuMat d_mat_a, d_mat_b, d_result;
d_mat_a.upload(mat_a);
d_mat_b.upload(mat_b);
auto start_gpu = std::chrono::high_resolution_clock::now();
gpu_matrix_mult(d_mat_a, d_mat_b, d_result);
auto end_gpu = std::chrono::high_resolution_clock::now();
double gpu_time = std::chrono::duration_cast<std::chrono::milliseconds>(end_gpu - start_gpu).count();
// 下载结果进行验证
cv::Mat gpu_result;
d_result.download(gpu_result);
// 计算误差(一般为空)
double diff = cv::norm(cpu_result, gpu_result, cv::NORM_L2);
std::cout << "Result difference: " << diff << "\n";
std::cout << "Performance Results:\n"
<< " - CPU time: " << cpu_time << " ms\n"
<< " - GPU time: " << gpu_time << " ms\n"
<< " - Speedup: " << cpu_time / gpu_time << "x\n";
std::cout << "\n✅ CUDA matrix multiplication test completed\n";
return 0;
} catch (const cv::Exception& e) {
std::cerr << "OpenCV Error (" << e.err << "): " << e.what() << "\n";
return -1;
} catch (const std::exception& e) {
std::cerr << "Standard Error: " << e.what() << "\n";
return -2;
}
}编译运行
jetson@jetson-desktop:~/work$ g++ test_cuda.cpp -o test_cuda `pkg-config --cflags --libs opencv4`
jetson@jetson-desktop:~/work$ ./test_cuda
--- OpenCV CUDA Performance Test ---
Performance Results:
- CPU time: 2451 ms
- GPU time: 918 ms
- Speedup: 2.66993x
✅ CUDA performance test completed
安装使用pytorch和torchvision
PyTorch 是 Python 中最流行、最易用的深度学习框架之一。它让开发者能够像操作普通 Python 代码一样,直观、灵活地设计和训练复杂的神经网络模型。其简洁的 API 设计和强大的 GPU 加速支持,使得从研究想法到实际部署的开发过程都极其高效便捷,广受开发者青睐。
NVIDIA 为 Jetson 系列设备专门适配了对应的软件包,其版本依赖关系如下:
1.安装torch工具包
1.1下载并安装torch , torchvison
wget https://pypi.jetson-ai-lab.io/jp6/cu126/+f/62a/1beee9f2f1470/torch-2.8.0-cp310-cp310-linux_aarch64.whl
wget https://pypi.jetson-ai-lab.io/jp6/cu126/+f/907/c4c1933789645/torchvision-0.23.0-cp310-cp310-linux_aarch64.whl
pip install torch-2.8.0-cp310-cp310-linux_aarch64.whl torchvision-0.23.0-cp310-cp310-linux_aarch64.whl -i https://pypi.tuna.tsinghua.edu.cn/simple1.2 检测是否正确安装
使用python执行下面三个语句
jetson@jetson-desktop:~$ python
Python 3.10.16 (main, Dec 11 2024, 16:18:56) [GCC 11.2.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import torch
>>> print(torch.__version__)
2.8.0
>>> print(torch.cuda.is_available())
True2. 运行YOLO11
YOLO 是一种实时目标检测算法,它将目标检测视为单阶段回归问题,通过将图像划分为网格并直接预测边界框与类别概率,实现高速且高精度的检测。YOLO系列因开源易用、部署灵活,广泛应用于自动驾驶、安防监控、工业质检等领域。
2.1 安装miniconda
curl -L https://repo.anaconda.com/miniconda/Miniconda3-py310_25.3.1-1-Linux-aarch64.sh | bash
source ~/miniconda3/bin/activate
conda --version 2.2 conda换源
conda config --add channels https://mirrors.ustc.edu.cn/anaconda/pkgs/main/
conda config --add channels https://mirrors.ustc.edu.cn/anaconda/pkgs/free/
conda config --add channels https://mirrors.ustc.edu.cn/anaconda/cloud/conda-forge/
conda config --add channels https://mirrors.ustc.edu.cn/anaconda/cloud/msys2/
conda config --set show_channel_urls yes2.3创建conda环境
conda create -n jetson-ai python=3.102.4 进入conda环境
conda activate jetson-ai2.5 安装torch和torchvison
wget https://pypi.jetson-ai-lab.io/jp6/cu126/+f/62a/1beee9f2f1470/torch-2.8.0-cp310-cp310-linux_aarch64.whl
wget https://pypi.jetson-ai-lab.io/jp6/cu126/+f/907/c4c1933789645/torchvision-0.23.0-cp310-cp310-linux_aarch64.whl
pip install torch-2.8.0-cp310-cp310-linux_aarch64.whl torchvision-0.23.0-cp310-cp310-linux_aarch64.whl -i https://pypi.tuna.tsinghua.edu.cn/simple2.6 安装ultralytics
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple2.7 运行摄像头视频推理例程
接入摄像头,并在上面创建的环境中运行如下程序。
import cv2
import time
from ultralytics import YOLO
from ultralytics import YOLOWorld
# Load the YOLO model
model = YOLO("yolo11s.pt")
# Open the video file
video_path = 0
cap = cv2.VideoCapture(video_path)
# Loop through the video frames
while cap.isOpened():
# Read a frame from the video
success, frame = cap.read()
start = time.time()
if success:
# Run YOLO inference on the frame
results = model(frame)
inf_time = time.time() - start
# Visualize the results on the frame
annotated_frame = results[0].plot()
fps = 1.0 / inf_time if inf_time > 0 else 0
# show FPS
cv2.putText(annotated_frame, f"FPS: {fps:.2f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0,255,0), 2)
cv2.imshow("YOLO Inference", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) & 0xFF == ord("q"):
break
else:
# Break the loop if the end of the video is reached
break
# Release the video capture object and close the display window
cap.release()
cv2.destroyAllWindows()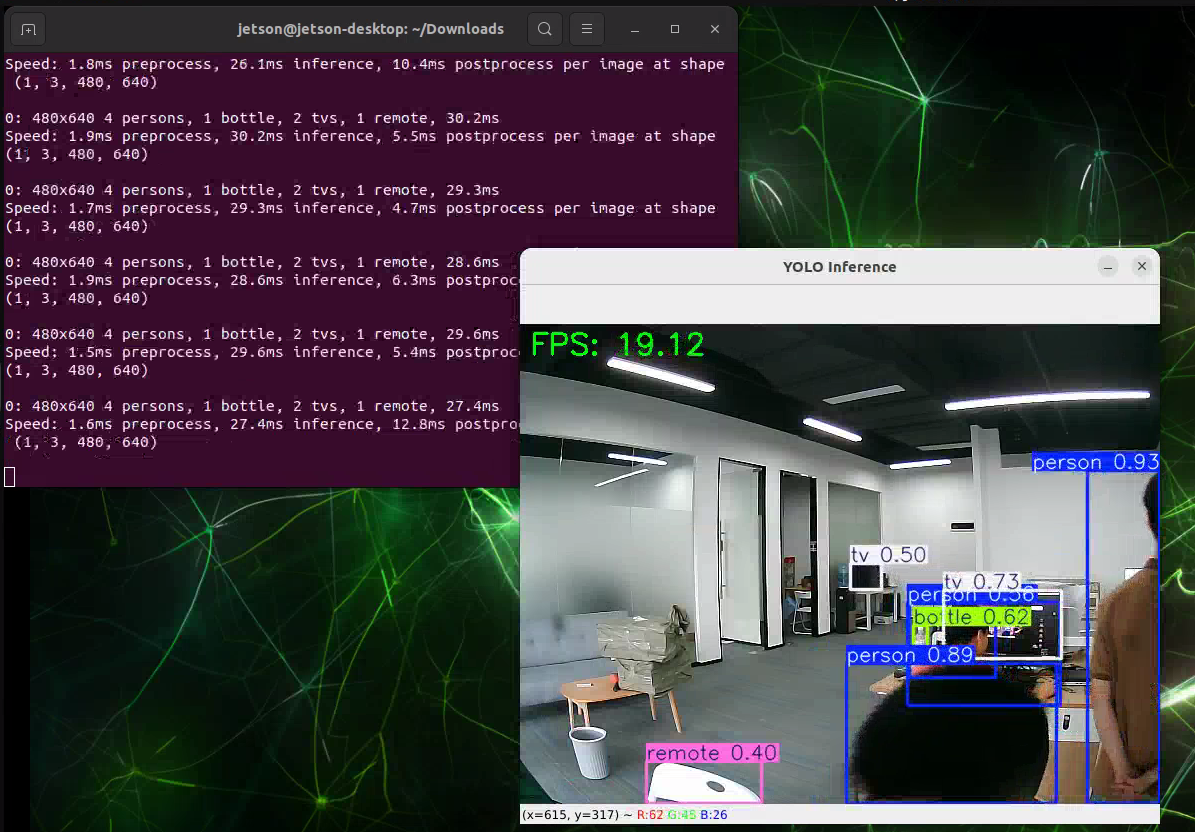
更多信息可参考Ultralytics YOLO11 -Ultralytics YOLO 文档
安装使用ollama
1. 运行以下指令安装ollama
curl -fsSL https://ollama.com/install.sh | sh2. 检查是否正确安装
jetson@jetson-desktop:~$ ollama -v
ollama version is 0.9.63. 下载并运行deepseek-r1 1.5b模型
ollama run deepseek-r1:1.5b
安装使用Jetson-container
开始本节内容前请确定您的网络环境能正常拉取docker镜像
Jetson-container是NVIDIA为Jetson设备打造的轻量Docker环境,预装CUDA、cuDNN、TensorRT,快速部署AI边缘应用。
本节以 Jetson Orin NX 16GB,JetPack6.2.1 运行 Comfy-UI 为例进行展示。您也可以参考官方示例
Comfy-UI 是一款专业的节点式Stable Diffusion图形界面,拖拽连接即可构建文生图工作流,支持LoRA、ControlNet、视频扩散,低代码、易扩展等应用及特性。
1. 下载编译jetson-container环境
git clone https://github.com/dusty-nv/jetson-containers.git
cd jetson-containersbash
jetson-containers/install.sh2. 拉取docker镜像并运行
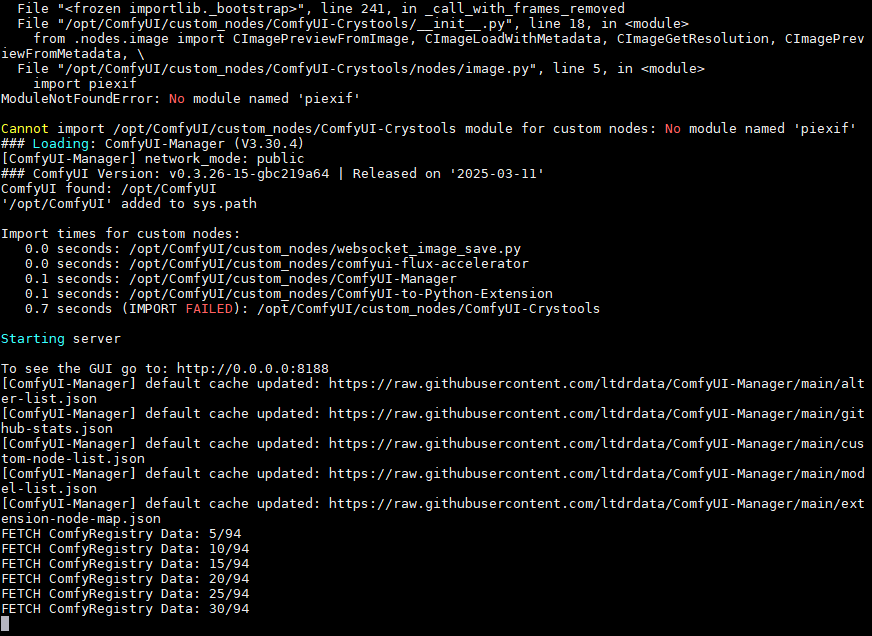
jetson-containers run dustynv/comfyui:r36.4.33. 成功运行后命令行窗口输出如下
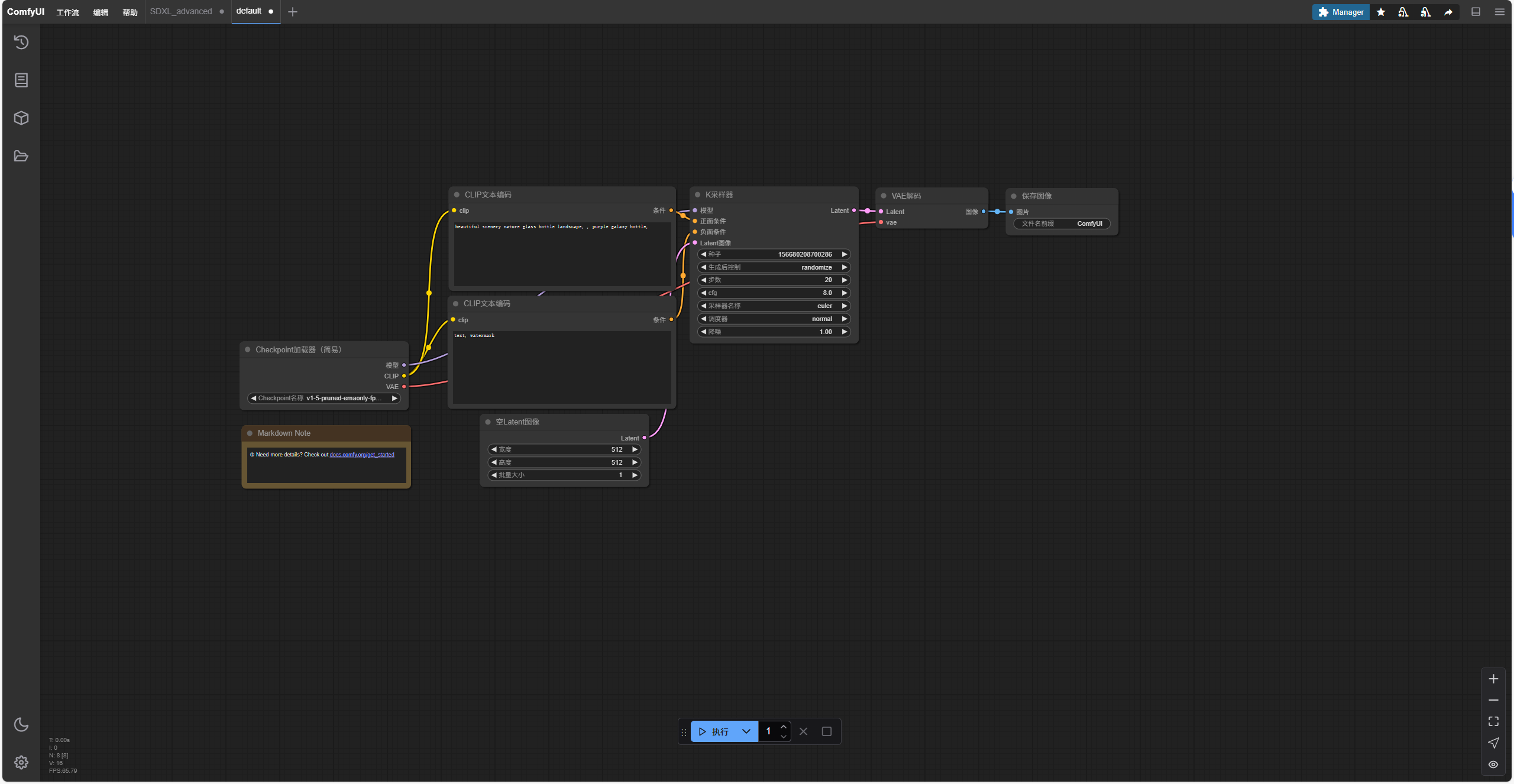
4. 打开对应服务的GUI网页
若在Jetson设备上打开则访问 http://0.0.0.0:8188
若在局域网内的其他设备则输入 http://<jetson设备IP>:8188
5. 设定映射路径,将开发板里下载好的模型映射到容器内部目录
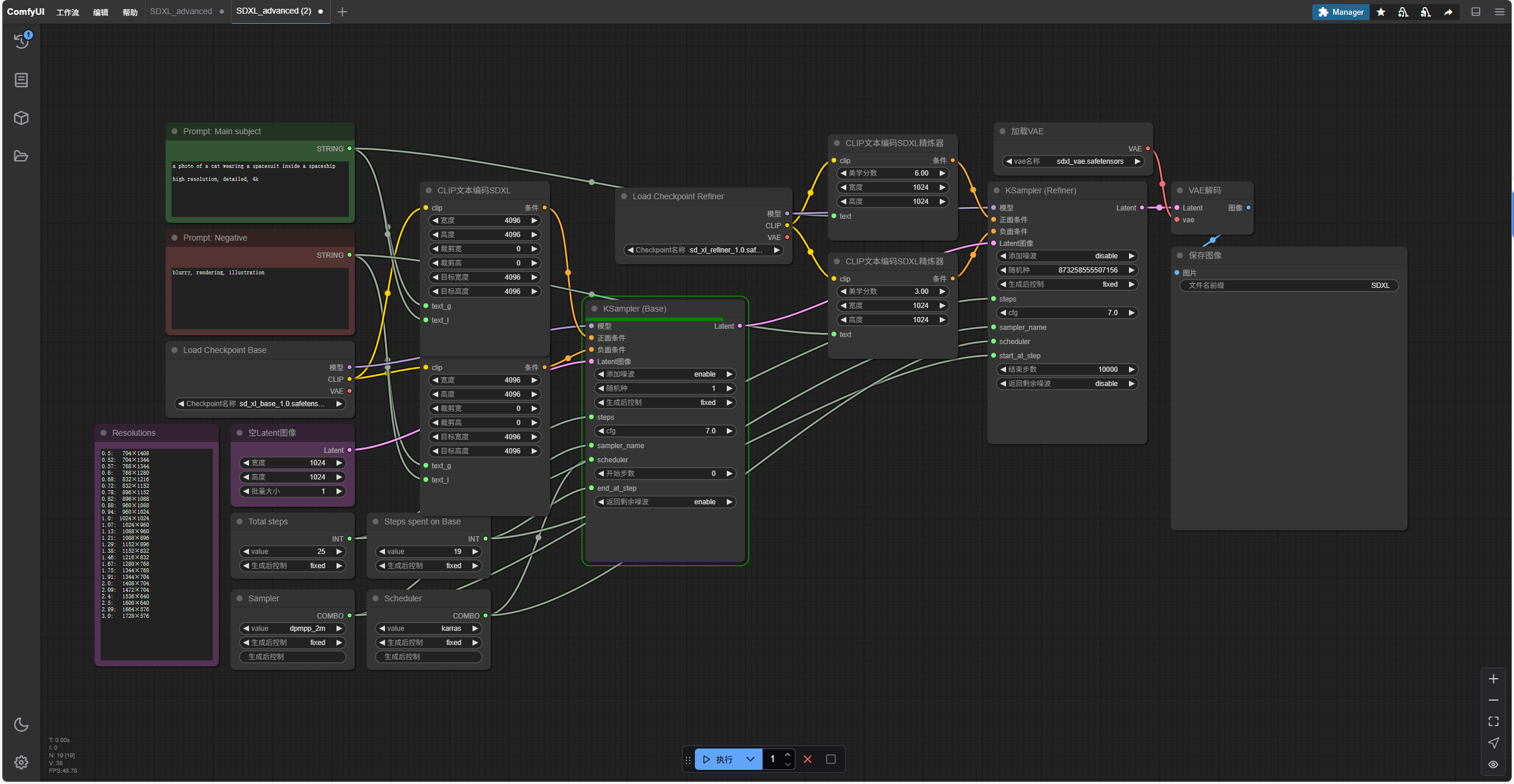
jetson-containers run ~/models/:/opt/ComfyUI/models/checkpoints dustynv/comfyui:r36.4.36. 按照需求搭建工作流并调整参数生成图像
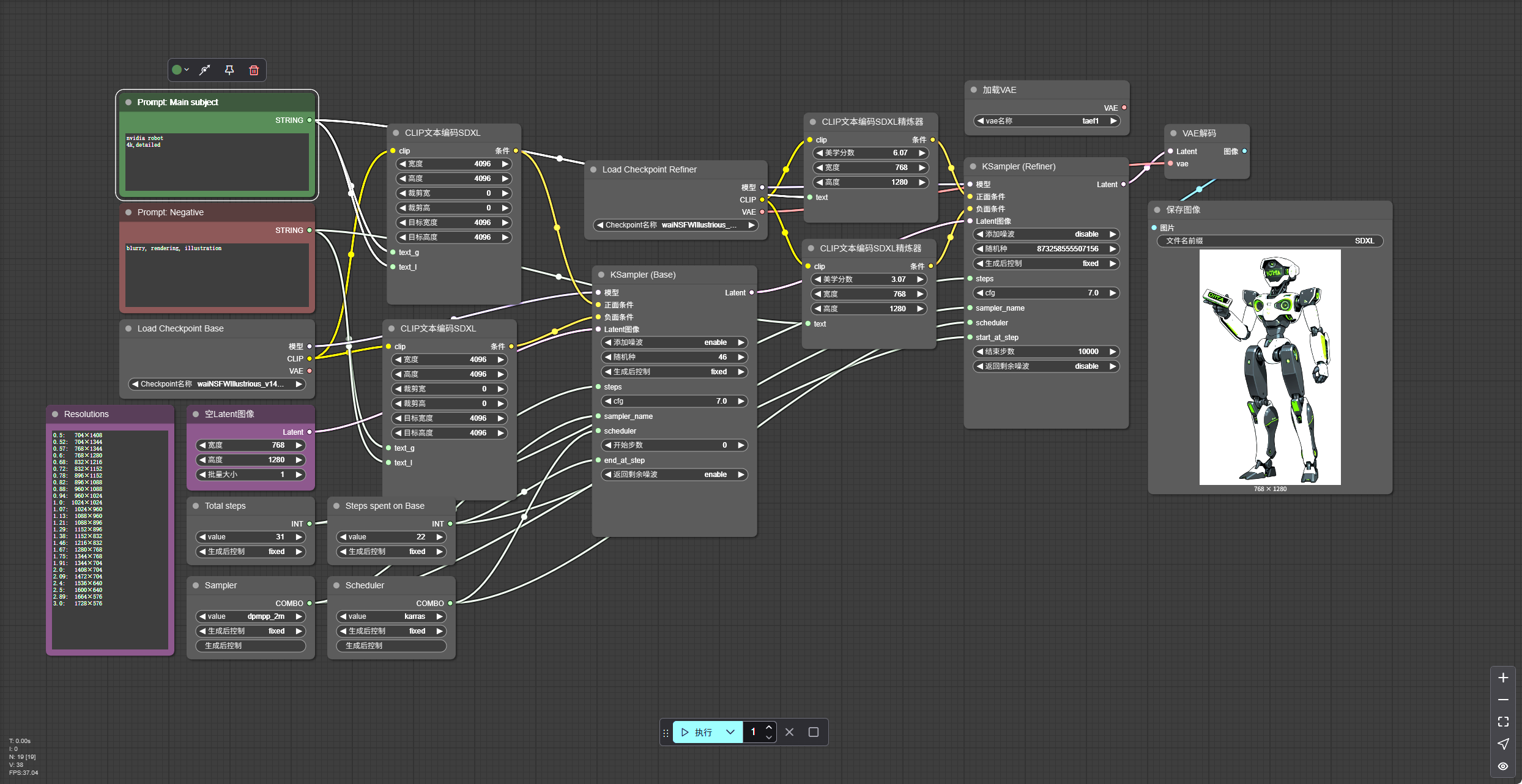
关于ComfyUI的使用教程请参考其官网 ComfyUI | 用AI生成视频、图像、音频
网卡驱动
在 JetPack6 以后官方移除了自带的 Intel 8625NGW 驱动,同时为了能够使用性能更优的 Intel AX200 和 AX210 网卡我们需要自行手动安装 Intel 网卡驱动包。
1. 插入网卡,通电开机,并查看网卡状态
sudo lshw -C network若显示product: Wi-Fi 6 AX200,则硬件已经检测到,若看到UNCLAIMED字样则表明驱动未安装
2. 安装 iwlwifi 驱动
iwlwifi 是英特尔(Intel)为其无线网卡开发的开源驱动程序,专为 Linux 操作系统设计,用于支持英特尔全系列无线网络适配器(如 Centrino、Wi-Fi 6/6E/7 等芯片)在 Linux 环境下的高效运行。
sudo apt update
sudo apt install backport-iwlwifi-dkms 3. 重启开发板
sudo reboot4. 再次查看网卡状态
jetson@jetson-desktop:~$ sudo lshw -C network
[sudo] password for jetson:
*-network
description: Wireless interface
product: Wi-Fi 6 AX200
vendor: Intel Corporation
physical id: 0
bus info: pci@0001:01:00.0
logical name: wlan0
version: 1a
serial: ac:12:03:a0:4c:db
width: 64 bits
clock: 33MHz
capabilities: pm msi pciexpress msix bus_master cap_list ethernet physical wireless
configuration: broadcast=yes driver=iwlwifi driverversion=5.10.216-tegra firmware=59.601f3a66.0 cc-a0-59.ucode latency=0 link=no multicast=yes wireless=IEEE 802.11
resources: irq:55 memory:20a8000000-20a8003fff
*-networkdescription 字段显示为 Wireless interface /Ethernet interface 便可正常使用无线网卡
4G模块使用说明
移远通信LTE Standard EM05系列是一款专为IoT/M2M应用而设计的LTE Cat 4模块。采用节省空间的M.2(NGFF)封装类型,超薄、紧凑的设计使其更易于嵌入到小尺寸产品中。
EM05系列支持最大下行速率150 Mbps,最大上行速率50 Mbps,包含三个型号:EM05-CN、EM05-E和EM05-G。支持LTE-FDD、LTE-TDD、DC-HSDPA、HSPA+、HSDPA、HSUPA、WCDMA和CDMA等多种网络制式。
要在Jetson系列上使用EM-05模块需要重新编译系统内核并刷入新编译的系统。
方法一:替换新内核
1.1 拉取编译好的资料
1.2 修改设备树配置文件
1.3 移动内核和驱动到指定位置
1.4 应用更改并重启验证
方法二:编译刷入完整系统
2.1 获取源码和工具链
- 安装编译依赖工具
sudo apt install build-essential bc git bison flex libssl-dev zip libncurses-dev make git- 创建工具链放置目录
mkdir $HOME/l4t-gcc-toolchain
cd $HOME/l4t-gcc-toolchain- 下载并解压交叉编译工具链
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v3.0/toolchain/aarch64--glibc--stable-2022.08-1.tar.bz2
tar xf aarch64--glibc--stable-2022.08-1.tar.bz2- 进入到缓存好的刷机固件目录
cd $HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/source #根据实际目录进行修改- 根据 release tag 拉取源码。Jetson Linux Archive | NVIDIA Developer
./source_sync.sh -k -t <release-tag> #<release-tag>替换为你自己的发行版本如 jetson_36.4.32.2 修改内核源码
本部分内容可参考移远Linux&Andriod驱动技术手册
Jetson Orin Nano配置文件路径:arch/arm64/configs/defconfig
- 配置USB转串口驱动添加如下内容
CONFIG_USB_SERIAL=y
CONFIG_USB_SERIAL_WWAN=y
CONFIG_USB_SERIAL_OPTION=y
CONFIG_USB_NET_DRIVERS=y
CONFIG_USB_USBNET=y
CONFIG_USB_NET_QMI_WWAN=y
CONFIG_USB_WDM=y- 修改 drivers/usb/serial/option.c,向USB转串口驱动添加VID和PID
static const struct usb_device_id option_ids[] = {
#if 1 // 2025-04-24 Added by Quectel
{ USB_DEVICE(0x2C7C, 0x0125) },
#endif
... ...
}- 使用USBNet驱动,文件路径:drivers/usb/serial/option.c
static int option_probe(struct usb_serial *serial,
const struct usb_device_id *id)
{
... ...
#if 1 // 2025-04-24 Added by Quectel
if (serial->dev->descriptor.idVendor == cpu_to_le16(0x2C7C)) {
__u16 idProduct = le16_to_cpu(serial->dev->descriptor.idProduct);
struct usb_interface_descriptor *intf = &serial->interface->cur_altsetting->desc;
if (intf->bInterfaceClass != 0xFF || intf->bInterfaceSubClass == 0x42) {
//ECM, RNDIS, NCM, MBIM, ACM, UAC, ADB
return -ENODEV;
}
if ((idProduct&0xF000) == 0x0000) {
//MDM interface 4 is QMI
if (intf->bInterfaceNumber == 4 && intf->bNumEndpoints == 3
&& intf->bInterfaceSubClass == 0xFF && intf->bInterfaceProtocol == 0xFF)
return -ENODEV;
}
}
#endif
/* Store the device flags so we can use them during attach. */
usb_set_serial_data(serial, (void *)device_flags);
return 0;
}
- 添加零包机制,文件路径:drivers/usb/serial/usb_wwan.c
static struct urb *usb_wwan_setup_urb(struct usb_serial_port *port,
int endpoint,
int dir, void *ctx, char *buf, int len,
void (*callback) (struct urb *))
{
... ...
usb_fill_bulk_urb(urb, serial->dev,
usb_sndbulkpipe(serial->dev, endpoint) | dir,
buf, len, callback, ctx);
#if 1 //2025-04-24 Added by Quectel for zero packet
if (dir == USB_DIR_OUT) {
struct usb_device_descriptor *desc = &serial->dev->descriptor;
if (desc->idVendor == cpu_to_le16(0x2C7C))
urb->transfer_flags |= URB_ZERO_PACKET;
}
#endif
return urb;
}- 添加Reset-resume机制(休眠唤醒)文件路径:drivers/usb/serial/option.c
static struct usb_serial_driver option_1port_device = {
... ...
#ifdef CONFIG_PM
.suspend = usb_wwan_suspend,
.resume = usb_wwan_resume,
#if 1 //2025-04-24 Added by Quectel
.reset_resume = usb_wwan_resume,
#endif
#endif
};- 添加QMI_WWAN驱动
移远提供了QMI_WWAN驱动源文件qmi_wwan_q.c,将其复制到 drivers/net/usb/ 目录下。同时修改drivers/net/usb/Makefile,使其能编译 qmi_wwan_q.c
#Makefile
# must insert qmi_wwan_q.o before qmi_wwan.o
obj-${CONFIG_USB_NET_QMI_WWAN} += qmi_wwan_q.o
obj-${CONFIG_USB_NET_QMI_WWAN} += qmi_wwan.o 2.3 编译内核
此步骤可能需要进行半个小时以上
- 创建输出目录
cd ../../
mkdir kernel_out - 编译安装内核
export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- #设置交叉编译工具
make -C kernel #构建 Jetson Linux 内核镜像
sudo -E make install -C kernel #安装内核模块和树内模块- 将内核镜像复制到刷机目录下
cp kernel/kernel-jammy-src/arch/arm64/boot/Image ../Linux_for_Tegra/kernel/Image- 构建NVIDIA树外模块(驱动程序)
export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu-
export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src
make modules- 安装到刷机目录下
export INSTALL_MOD_PATH=$HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/rootfs/ #根据实际目录进行修改
sudo -E make modules_install- 开始构建DTB
export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu-
export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src
make dtbs- 将生成的dtb文件拷贝到刷机目录
cp kernel-devicetree/generic-dts/dtbs/* ../kernel/dtb/2.4 刷入系统
- 进入刷机固件缓存目录
cd $HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/source #根据实际目录进行修改使用命令行刷机:
- super模式
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit-super internal- 普通模式
sudo ./flash.sh jetson-orin-nano-devkit-nvme internal2.5 开机验证
- 将Quectel_Qconnectmanager上传到开发板
- 解压并编译
unizp Quectel_QConnectManager_Linux_V1.6.5.zip
cd Quectel_QConnectManager_Linux_V1.6.5
make成功运行便可4G拨号上网
jetson@jetson-desktop:~/Downloads/Quectel_QConnectManager_Linux_V1.6.5$ sudo ./quectel-CM
[08-08_11:39:04:415] QConnectManager_Linux_V1.6.5
[08-08_11:39:04:416] Find /sys/bus/usb/devices/1-2.2 idVendor=0x2c7c idProduct=0x125, bus=0x001, dev=0x007
[08-08_11:39:04:416] Auto find qmichannel = /dev/cdc-wdm0
[08-08_11:39:04:417] Auto find usbnet_adapter = wwan0
[08-08_11:39:04:417] netcard driver = qmi_wwan_q, driver version = V1.2.6
[08-08_11:39:04:417] Modem works in QMI mode
[08-08_11:39:04:447] cdc_wdm_fd = 7
[08-08_11:39:04:523] Get clientWDS = 5
[08-08_11:39:04:557] Get clientDMS = 1
[08-08_11:39:04:589] Get clientNAS = 2
[08-08_11:39:04:620] Get clientUIM = 1
[08-08_11:39:04:653] Get clientWDA = 1
[08-08_11:39:04:684] requestBaseBandVersion EM05CNFDR08A03M1G_ND
[08-08_11:39:04:812] requestGetSIMStatus SIMStatus: SIM_READY
[08-08_11:39:04:876] requestGetProfile[pdp:1 index:1] ctnet///0/IPV4V6
[08-08_11:39:04:908] requestRegistrationState2 MCC: 460, MNC: 11, PS: Attached, DataCap: LTE
[08-08_11:39:04:940] requestQueryDataCall IPv4ConnectionStatus: DISCONNECTED
[08-08_11:39:04:941] ip addr flush dev wwan0
[08-08_11:39:04:947] ip link set dev wwan0 down
[08-08_11:39:05:003] requestSetupDataCall WdsConnectionIPv4Handle: 0x8723e530
[08-08_11:39:05:132] ip link set dev wwan0 up
[08-08_11:39:05:141] No default.script found, it should be in '/usr/share/udhcpc/' or '/etc//udhcpc' depend on your udhcpc version!
[08-08_11:39:05:142] busybox udhcpc -f -n -q -t 5 -i wwan0
udhcpc: started, v1.30.1
udhcpc: sending discover
udhcpc: sending select for 10.21.181.66
udhcpc: lease of 10.21.181.66 obtained, lease time 7200
[08-08_11:39:05:282] ip -4 address flush dev wwan0
[08-08_11:39:05:286] ip -4 address add 10.21.181.66/30 dev wwan0
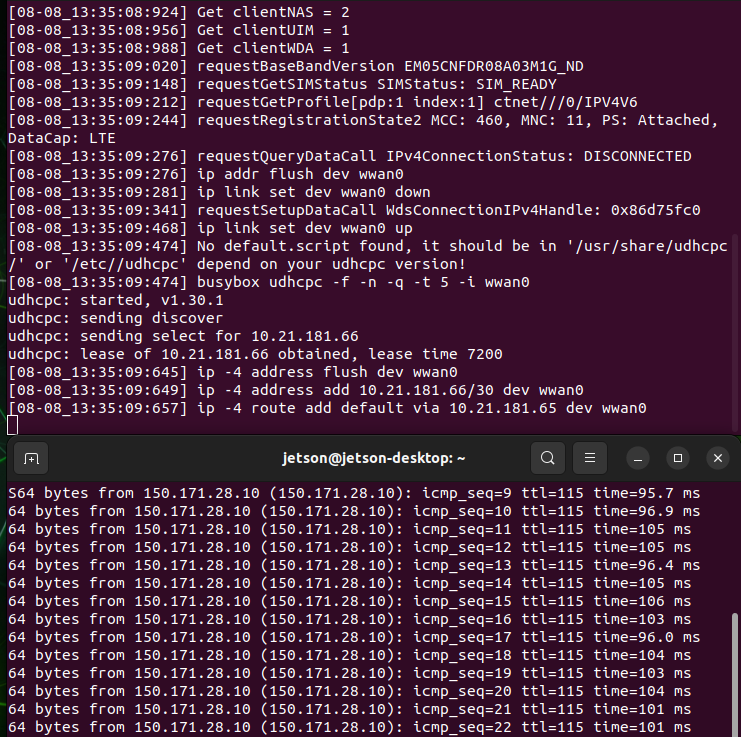
[08-08_11:39:05:292] ip -4 route add default via 10.21.181.65 dev wwan0查看网卡信息
jetson@jetson-desktop:~$ ifconfig wwan0
wwan0: flags=193<UP,RUNNING,NOARP> mtu 1500
inet 10.21.181.66 netmask 255.255.255.252
inet6 fe80::5804:41ff:feda:ce83 prefixlen 64 scopeid 0x20<link>
ether 5a:04:41:da:ce:83 txqueuelen 1000 (Ethernet)
RX packets 9 bytes 2304 (2.3 KB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 22 bytes 1854 (1.8 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
连通性测试
基础镜像制作
环境准备
- 安装编译依赖工具
sudo apt install build-essential bc git bison flex libssl-dev zip libncurses-dev make git创建工具链放置目录
mkdir $HOME/l4t-gcc-toolchain
cd $HOME/l4t-gcc-toolchain- 下载并解压交叉编译工具链
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v3.0/toolchain/aarch64--glibc--stable-2022.08-1.tar.bz2
tar xf aarch64--glibc--stable-2022.08-1.tar.bz2- 进入到缓存好的刷机固件目录
cd $HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/source #根据实际目录进行修改- 同步源码
./source_sync.sh -k -t <release-tag> #<release-tag>替换为你自己的发行版本如 jetson_36.4.3修改添加设备树和驱动
Intel无线网卡
参考 网卡说明 在开发板安装驱动后进入 /usr/lib/modules/$(uname -r)/updates提取 ko驱动,
复制到固件缓存目录 Linux_for_Tegra/rootfs/lib/modules/5.15.148-tegra/updates/ 文件夹
realtek 8125网卡
将在开发板上编译安装好的ko驱动放入 Linux_for_Tegra/rootfs/lib/modules/5.15.148-tegra/updates/dkms
烧录完成进入系统后需要运行命令使能 r8125.ko
sudo depmod -a
sudo modprobe r81254G模块
需要改动内核镜像
支持HDMI 4K
tegra234-dcb-p3737-0000.dtsinvidia,dcb-image 字段,对应的HDMI-dcb二进制串可在源码的 source/hardware/nvidia/t23x/nv-public/overlay/tegra234-dcb-p3767-0000-hdmi.dts 中找到。USB设备树
tegra234-p3768-0000.dtsi的 padctl@3520000 节点 padctl@3520000 {
status = "okay";
pads {
usb2 {
lanes {
usb2-0 {
nvidia,function = "xusb";
status = "okay";
};
usb2-1 {
nvidia,function = "xusb";
status = "okay";
};
usb2-2 {
nvidia,function = "xusb";
status = "okay";
};
};
};
usb3 {
lanes {
usb3-0 {
nvidia,function = "xusb";
status = "okay";
};
usb3-1 {
nvidia,function = "xusb";
status = "okay";
};
usb3-2 {
nvidia,function = "xusb";
status = "okay";
};
};
};
};
ports {
/* recovery port */
usb2-0 {
mode = "otg";
vbus-supply = <&vdd_5v0_sys>;
status = "okay";
usb-role-switch;
};
/* hub */
usb2-1 {
mode = "host";
vbus-supply = <&vdd_1v1_hub>;
status = "okay";
};
/* M.2 Key-E */
usb2-2 {
mode = "host";
vbus-supply = <&vdd_5v0_sys>;
status = "okay";
};
/* hub */
usb3-0 {
nvidia,usb2-companion = <1>;
status = "okay";
};
/* J5 */
usb3-1 {
nvidia,usb2-companion = <0>;
status = "okay";
};
usb3-2 {
nvidia,usb2-companion = <2>;
status = "okay";
};
};
};
usb@3550000 {
status = "okay";
phys = <&{/bus@0/padctl@3520000/pads/usb2/lanes/usb2-0}>,
<&{/bus@0/padctl@3520000/pads/usb3/lanes/usb3-1}>;
phy-names = "usb2-0", "usb3-0";
};
usb@3610000 {
status = "okay";
phys = <&{/bus@0/padctl@3520000/pads/usb2/lanes/usb2-0}>,
<&{/bus@0/padctl@3520000/pads/usb2/lanes/usb2-1}>,
<&{/bus@0/padctl@3520000/pads/usb2/lanes/usb2-2}>,
<&{/bus@0/padctl@3520000/pads/usb3/lanes/usb3-0}>,
<&{/bus@0/padctl@3520000/pads/usb3/lanes/usb3-1}>,
<&{/bus@0/padctl@3520000/pads/usb3/lanes/usb3-2}>;
phy-names = "usb2-0", "usb2-1", "usb2-2", "usb3-0",
"usb3-1", "usb3-2";
};编译内核、设备树和树外设备
2.3 编译内核
此步骤可能需要进行半个小时以上
- 创建输出目录
cd ../../
mkdir kernel_out- 编译安装内核
export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu- #设置交叉编译工具
make -C kernel #构建 Jetson Linux 内核镜像
sudo -E make install -C kernel #安装内核模块和树内模块- 将内核镜像复制到刷机目录下
cp kernel/kernel-jammy-src/arch/arm64/boot/Image ../kernel/- 构建NVIDIA树外模块(驱动程序)
export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu-
export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src
make modules- 安装到刷机目录下
export INSTALL_MOD_PATH=$HOME/nvidia/nvidia_sdk/JetPack_6.2.1_Linux_JETSON_ORIN_NANO_TARGETS/Linux_for_Tegra/rootfs/ #根据实际目录进行修改
sudo -E make modules_install- 开始构建DTB
export CROSS_COMPILE=$HOME/l4t-gcc-toolchain/aarch64--glibc--stable-2022.08-1/bin/aarch64-buildroot-linux-gnu-
export KERNEL_HEADERS=$PWD/kernel/kernel-jammy-src
make dtbs- 将生成的dtb文件拷贝到刷机目录
cp kernel-devicetree/generic-dts/dtbs/* ../kernel/dtb/刷写系统命令:
- 普通模式
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit internal- super模式
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit-super internal仅刷写QSPI命令:
- 普通模式
sudo ./flash.sh -c bootloader/t186ref/cfg/flash_t234_qspi.xml --no-systemimg jetson-orin-nano-devkit nvme0n1p1- super模式
sudo ./flash.sh -c bootloader/t186ref/cfg/flash_t234_qspi.xml --no-systemimg jetson-orin-nano-devkit-super nvme0n1p1自定义启动LOGO
开机时,开发板会进入UEFI引导系统启动,期间会显示NVIDIA默认的LOGO背景,如果您需要自定义该图片,需要按照一下操作获取UEFI源码替换图片内容重新编译UEFI并刷入到开发板中。
一、安装docker环境
如果已安装docker可以跳过此步骤,但要确保当前用户添加到docker 用户组
sudo apt install docker.io将当前用户添加到docker 用户组后重启生效
sudo usermod -a -G docker ${USER}
sudo reboot设置变量
export EDK2_DEV_IMAGE="ghcr.io/tianocore/containers/ubuntu-22-dev:latest"
export EDK2_USER_ARGS="-v \"${HOME}\":\"${HOME}\" -e EDK2_DOCKER_USER_HOME=\"${HOME}\""
export EDK2_BUILD_ROOT="/build"
export EDK2_BUILDROOT_ARGS="-v \"${EDK2_BUILD_ROOT}\":\"${EDK2_BUILD_ROOT}\""
alias edk2_docker="docker run -it --rm -w \"\$(pwd)\" ${EDK2_BUILDROOT_ARGS} ${EDK2_USER_ARGS} \"${EDK2_DEV_IMAGE}\""拉取并验证环境
edk2_docker echo hello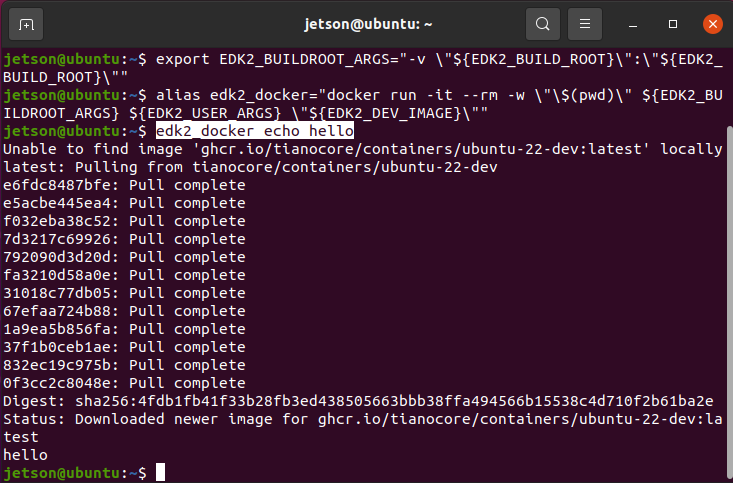
二、拉取源码
初始化edk2环境
edk2_docker init_edkrepo_conf
edk2_docker edkrepo manifest-repos add nvidia https://github.com/NVIDIA/edk2-edkrepo-manifest.git main nvidia根据JetPack版本拉取uefi源码 (以JetPack6.2.1/r36.4.4为例)
edk2_docker edkrepo clone nvidia-uefi-r36.4.4 NVIDIA-Platforms r36.4.4-updates该过程会同步多个git项目,可能耗时较长。
同步完成后可以在以下目录找到默认的LOGO文件
cd nvidia-uefi-r36.4.4/edk2-nvidia/Silicon/NVIDIA/Assets/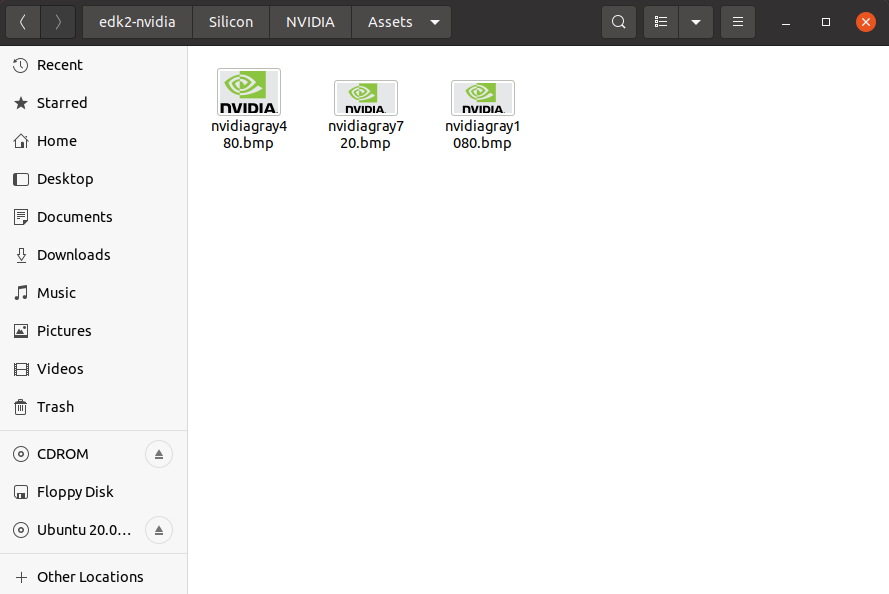
您可以选择直接替换掉这三个分辨率的图片,也可以在下面的配置文件中更改引用的LOGO文件路径
cd nvidia-uefi-r36.4.0/edk2-nvidia/Platform/NVIDIA/NVIDIA.fvmain.fdf.inc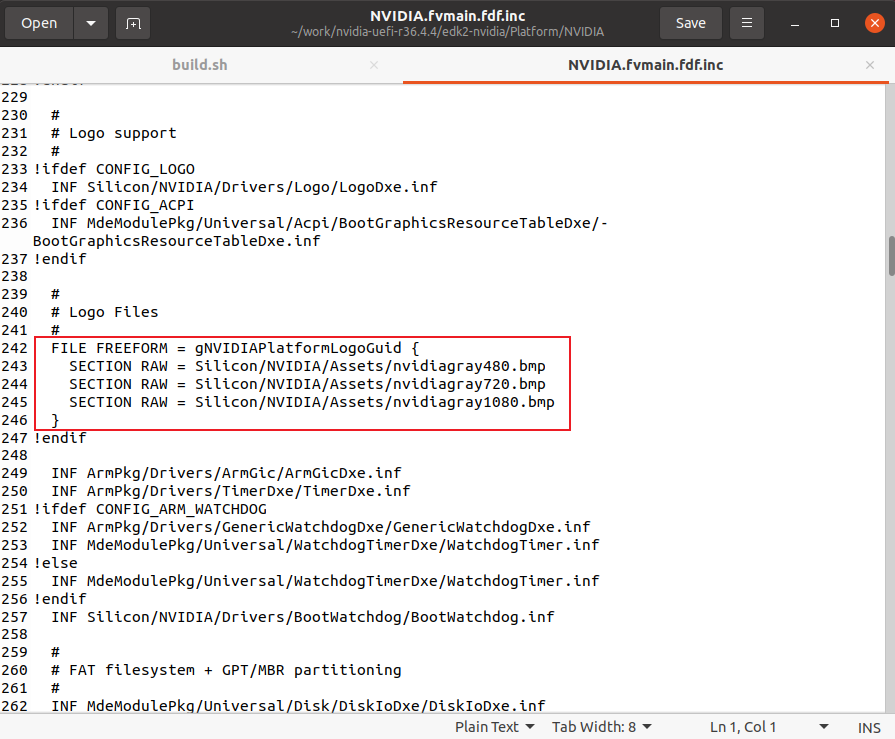
应该尽可能地控制文件大小,最后的编译出的uefi_xxx.bin不得超过3.5MB,否则刷入后开发板将无法启动。
三、编译
替换完成后,执行以下命令编译UEFI固件
cd nvidia-uefi-r36.4.4/
edk2_docker edk2-nvidia/Platform/NVIDIA/Jetson/build.sh
四、替换
五、刷入